

С. Леонов, Т. Гладких
Использование современных
технологий требует применения новых методов и средств проектирования,
позволяющих повысить качество выполняемых разработок. Качественно новое
решение в этом плане может дать K-значное дифференциальное исчисление.
Говоря об анализе работоспособности
современных БИС, желательно иметь возможность выполнения взаимосвязанных
процессов моделирования, топологического проектирования и уч╦та помех.
Подобная методика используется в разработанной авторами системе моделирования
на основе K-значного дифференциального исчисления. Схема, отображающая
последовательность проектирования устройства в данной системе, приведена
на рис. 1. Она состоит из совокупности взаимосвязанных блоков, каждый
из которых выполняет конкретную задачу проектирования.
Рис. 1. Схема последовательности проектирования устройства в системе моделирования на основе К-значного дифференциальногоисчисления
При использовании метода K-значного
дифференциального исчисления для математического моделирования вычислительных
устройств сигналы кодируются в K-значном алфавите {0,1,...,K√1}. При этом
минимальное значение сигнала кодируется нул╦м, а максимальное ≈ (K√1).
На этом множестве вводятся бинарные операции сложения, вычитания, умножения
и деления. В отличие от методов многозначного моделирования, в предлагаемом
методе для получения значений сигналов используются не сами многозначные
функции, а их производные. Это позволяет значительно сократить время моделирования,
поскольку вычисления выполняются только для процессов переключения сигналов.
K-значные производные, используемые в данном методе, делятся на три вида:
 |
 |
Первая формула позволяет вычислять
значение K-значной производной по известному значению функции в текущий
ti и последующий ti + Dt
моменты времени, вторая ≈ в текущий и предыдущий. Иногда удобно использование
третьей формулы. Выбор метода дифференцирования определяется, прежде всего,
исходными данными.
Сеанс проектирования является
сквозным и взаимосвязанным, что предполагает обоюдное влияние моделирования
и расч╦та параметров электромагнитной совместимости. При этом для расч╦та
помех используются K-значные дифференциальные уравнения напряжений и токов:
 |
 |
где UK ≈ K-значное
напряжение помехи, наводимой перепадами напряжения в m-ом пассивном проводнике;
UK и IK ≈ величины K-значных напряжения и тока при
перепаде в n-ом активном проводнике, соответственно; tK = tK(tr)
≈ постоянная времени переходного процесса; p и q ≈ числа пассивных и активных
проводников, взаимосвязь которых учитывается; j ≈ количество участков
m-го пассивного проводника, являющегося при╦мником наводок; С ≈ суммарная
╦мкость выхода логического элемента в активной линии; Rrnout
≈ выходное сопротивление логического элемента в активной линии; Cij
и Mij ≈ соответственно ╦мкость взаимной связи и взаимоиндукция
отдельных участков проводников, влияние которых анализируется.
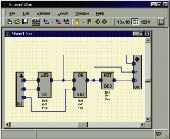
Вс╦ это может быть проиллюстрировано
на примере моделирования простого устройства в разработанной системе.
Изображение схемы этого устройства и временные диаграммы его моделирования
приведены на рис. 2. На вход этого устройства поступают сигналы, принимающие
значения только ⌠0■ и ⌠K√1■. Однако при этом их форма на выходе элементов
уже существенно меняется. Это вызвано тем, что внутренние характеристики
элементов позволяют преобразовать мгновенный перепад (⌠0■ ╝
⌠1■ и ⌠1■ ╝ ⌠0■) в ступенчатую функцию, соответствующую
переходному процессу переключения сигналов. Если же входной сигнал имеет
более сложную форму, то элемент отрабатывается в соответствии с законом
его функционирования. Обратите внимание, что на выделенном участке временной
диаграммы иллюстрируется отработка сбоя в работе устройства, именуемого
⌠гонкой■. Несогласование процессов переключения сигналов In1_1 и In1_2
(⌠1■ ╝ ⌠0■ и ⌠0■ ╝
⌠1■, соответственно) привело к появлению короткого положительного всплеска
по выходу элемента AND (Out1_1), который в свою очередь был отработан
элементами OR и NOT.
 |
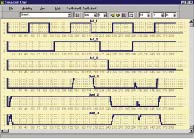 |
Рис. 2. Схема простого устройства в разработанной системе и временные диаграммы его моделирования |
|
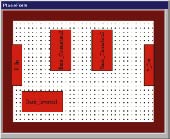
Однако при этом нельзя не учитывать
параметры электромагнитной совместимости устройства, поскольку при исследовании
его поведения в динамике, их влияние может оказаться существенным. Этапы
топологического проектирования (компоновка √ размещение √ трассировка)
отражены на рис. 3. Как видно из рисунка, достаточно существенное влияние
друг на друга могут оказать только два входных проводника In1_1 и In1_2
и гораздо менее ощутимое ≈ проводники In1_2 и In1_3. Помехи, наводимые
оставшимися проводниками, будут настолько малы, что их влияние можно не
учитывать.
 |
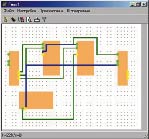 |
Рис. 3. Этапы топологического проектирования устройства |
|
Временные диаграммы работы проектируемого
устройства (рис. 2) с уч╦том влияния помех, представленных в K-значной
форме, приведены на рис. 4. Здесь показано влияние фронтов переключения
сигналов в активном проводнике на соответствующий пассивный проводник.
При этом перепад напряжения из ⌠1■ в ⌠0■ на активном проводнике In1_1
наводит в пассивном проводнике In1_2 помеху положительной полярности (выделенный
участок 1). Это сопровождается появлением всплеска напряжения, накладываемого
на нулевой уровень логического сигнала. Перепад напряжения на этом же
активном проводнике из ⌠0■ в ⌠1■ приводит к возникновению отрицательной
помехи, которая, в свою очередь, приводит к ⌠провалу■ уровня логической
⌠единицы■ на соответствующем пассивном проводнике (выделенный участок
2). Аналогичные сбойные ситуации возникают и при исследовании других контрольных
точек устройства. Такое искажение формы входных сигналов отрабатывается
последующими элементами проектируемого устройства, что может привести
к их ложному срабатыванию.
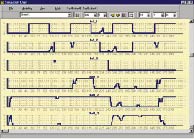
Рис. 4. Временные диаграммы работы проектируемого устройства (рис. 2) с учетом влияния помех, представленных в К-значной форме
Описываемая методика позволяет
выполнять анализ целостности сигналов при выполнении комплексного проектирования
БИС. При этом, в зависимости от требуемой точности, а также временных
и аппаратурных затрат, имеется возможность выполнять анализ на основе
булевого моделирования при уменьшении значности входного алфавита K до
значения, равного двум. Возможно также значительное улучшение точности
моделирования за сч╦т увеличения K для исследования быстрого изменения
сигналов в БИС, которое в пределе может перейти к моделированию, близкому
к аналоговому. Эти преимущества в представленной системе сочетаются с
удобными средствами представления устройств в графическом виде и широкими
возможностями редактирования исходного варианта устройства для выбора
наиболее оптимальной конфигурации проектируемых БИС вычислительной системы.
E-mail: sul@rambler.ru