|
В. Тарасова, А. Парамонов, О. Куропаткин Адаптивная коррекция межсимвольных искаженийЧастотно-селективные замирания сигнала, обусловленные многолучевым распространением, приводят к отклонению частотной характеристики канала от идеальной формы, которой соответствует постоянная амплитуда и линейная фаза (постоянная задержка), и, в результате, к перекрытию принимаемых символов, называемому межсимвольными искажениями (МСИ) или межсимвольной интерференцией. Часто эти искажения являются главным препятствием на пути повышения скорости и достоверности передачи данных по каналам даже при малых уровнях фонового шума. Поэтому адаптивный корректор неидеальных характеристик канала (адаптивный корректор МСИ) является неотъемлемой частью демодулятора при╦много устройства. Межсимвольные искаженияМежсимвольные искажения возникают во всех системах с дискретной модуляцией, включая частотную манипуляцию (ЧМ), фазовую манипуляцию (ФМ) и квадратурную амплитудную модуляцию (КАМ). Однако е╦ влияние легче всего описать для системы с амплитудно-импульсной модуляцией (АИМ) в основной полосе частот. Введ╦м обозначения: H(f) - частотная характеристика канала, определяемая фильтром передатчика, радиоканалом и фильтром при╦мника, h(t) - импульсная реакция канала. Пусть в момент mT, где T - длительность символа, переда╦тся символ xm (один из L дискретных амплитудных уровней). Принятый сигнал r(t) представляет собой сумму импульсных реакций на каждый переданный символ и отсч╦тов аддитивного белого гауссовского шума n(t): Если взятие отсч╦тов производится в моменты kT + t, где t учитывает задержку в канале и фазу дискретизации, то Первый член в правой части - это требуемый сигнал, так как по нему можно определить переданный амплитудный уровень. Последний член описывает аддитивный шум, а сумма в среднем члене выражает интерференцию с соседними символами. Каждый интерференционный член пропорционален отсч╦ту импульсной характеристики канала h(iT + t), смещ╦нной относительно t на величину iT, кратную длительности символа. МСИ обращаются в нуль тогда и только тогда, когда h(iT + t) = 0, i ╧ 0, то есть когда импульсная характеристика пересекает нулевой уровень в точках, отстоящих друг от друга на величину T. Если импульсная характеристика пересекает нулевой уровень в таких равноотстоящих точках, то говорят, что она удовлетворяет первому критерию Найквиста. В частотной области это эквивалентно условию:
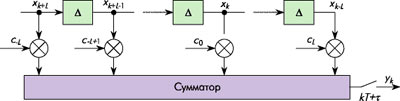
Здесь H'(f) - наложенная спектральная характеристика канала при дискретизации с частотой следования символов. Полосу частот от -1/2T до 1/2T принято называть полосой Найквиста. Если H(f) = 0 за пределами удвоенной полосы Найквиста, то наложенный спектр принимает простой вид: H'(f) = H(f) + H(f-1/T), 0 Примерами фильтров, удовлетворяющих первому критерию Найквиста, являются идеальный фильтр (фильтр с прямоугольной амплитудно-частотной характеристикой) с полосой Найквиста и фильтры с неч╦тной симметрией относительно точки 1/2T Гц (фазочастотная характеристика этих фильтров линейна). Широкое применение на практике нашли фильтры с характеристикой в форме приподнятого косинуса (косинусоидальный спад относительно точки 1/2T Гц). Линейные трансверсальные корректорыСреди множества используемых для коррекции устройств простейшим является трансверсальный корректор (ТК), который обычно реализуется в виде линии задержки с отводами или нерекурсивного устройства. Его структура представлена на рис. 1. В таком корректоре текущие и прошлые значения принятого сигнала линейно взвешиваются в соответствии с коэффициентами корректора (коэффициентами усиления отводов) и суммируются, образуя выходной сигнал. При цифровой реализации ТК отсч╦ты принятого сигнала, следующие с частотой дискретизации 1/D, вводятся в цифровой сдвиговый регистр (или запоминающее устройство), а выходные отсч╦ты корректора yk формируются в соответствии со следующим выражением: где N = 2L + 1 - количество отводов в фильтре, cj - коэффициенты усиления отводов, xk-j(t) = x(kT - jD + t) - принимаемый сигнал в момент выборки kT - jD + t, yk(t) = y(kT + t) - выходной сигнал корректора в момент выборки kT + t, t - временное положение первого отсч╦та, D - задержка сигнала между двумя соседними отводами. Рисунок 1. Линейный трансверсальный корректор
В зависимости от соотношения между D и T, различают T-интервальные (символьно-интервальные) корректоры (D = T) и дробно-интервальные корректоры (D = KT/M, где K и M - целые числа, прич╦м M > K). На практике удобно выбирать D = T/M, где M - небольшое целое число, например 2. T-интервальный корректор из-за наложения спектров при дискретизации не может осуществлять согласованную фильтрацию. В этом случае при╦мный фильтр в системе с линейной модуляцией должен состоять из последовательного соединения предварительного фильтра (например, фильтра, согласованного с сигналом, не искаж╦нным каналом) и трансверсального корректора. Дробно-интервальный корректор, благодаря применяемой в н╦м частоте дискретизации, способен осуществлять независимую регулировку спектра сигнала (по амплитуде и фазе) на обоих краях полосы, что существенно улучшает качество коррекции. По сравнению с T-интервальным, дробно-интервальный корректор обеспечивает эффективную компенсацию более сильных искажений характеристики задержки и в меньшей степени повышает уровень шума при коррекции амплитудных искажений. Для дробно-интервальных корректоров также характерна меньшая чувствительность к фазе дискретизации. Сопоставление количественных показателей T- и T/2-интервальных корректоров для КАМ-систем показало [1], что:
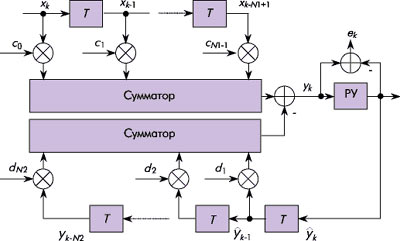
Алгоритм формирования коэффициентов корректора можно выбрать таким, что все отсч╦ты, кроме главного, суммарной импульсной характеристики канала и корректора, которые берутся с шагом T, будут обращаться в нуль. Такой алгоритм называют алгоритмом с форсированием нуля (ФН). Если число коэффициентов ФН корректора неограниченно возрастает, то получится корректор бесконечной длины, обеспечивающий полное подавление МСИ. Суммарная характеристика канала и корректора должна удовлетворять условию нулевой МСИ или первому критерию Найквиста: C(f)╥H'(f) = 1, |f| Это соотношение показывает, что корректор бесконечной длины с нулевой МСИ - просто обратный фильтр, который инвертирует наложенную частотную характеристику канала. ФН-корректор аппроксимирует такой обратный фильтр. На частотах, где наложенный спектр канала характеризуется сильным ослаблением сигнала, подобный обратный фильтр может чрезмерно повысить уровень шума, что нежелательно. Более над╦жен корректор, реализующий алгоритм минимума среднего квадрата ошибки (МСКО) - суммы квадратов всех членов МСИ и мощности шума на выходе корректора. Таким образом, МСКО-корректор максимизирует отношение сигнал/искажения на сво╦м выходе в пределах ограничений, связанных с временным интервалом действия корректора и создаваемой им задержкой. В большинстве современных высокоскоростных модемов используют МСКО-корректоры, поскольку они более устойчиво функционируют в условиях шума и повышенной МСИ, а также обладают более высокой, по сравнению с ФН-корректорами, сходимостью. Коэффициенты усиления отводов МСКО-корректора обновляются согласно соотношению: cj(k + 1) = cj(k) √ a╥ek╥xk-j(t), (6) где cj(k) - коэффициент усиления j-го отвода в момент k; ek - сигнал ошибки; a - положительный коэффициент адаптации или размер шага. После предварительной настройки (если она используется) коэффициенты адаптивного корректора могут непрерывно регулироваться по принимаемым решениям. В этом режиме сигнал ошибки ek = yk √ yk вычисляется по окончательной (необязательно верной) оценке yk переданного символа в демодуляторе. При нормальной работе вероятность правильных решений довольно высока. Поэтому во многих случаях оценки ошибок достаточно точны, чтобы обеспечивалась верная коррекция. Кроме того, адаптивный корректор с коррекцией по принимаемым решениям способен отслеживать медленные изменения характеристик канала или линейные возмущения на входе при╦мника, например, медленные колебания фазы дискретизации. Чем больше размер шага a, тем выше скорость отслеживания корректора. Однако необходим компромисс между быстротой слежения и избыточным средним квадратом ошибки (СКО). Избыточный СКО - это разность между мощностью ошибки и минимальной СКО, достижимой при фиксировании коэффициентов усиления отводов на их оптимальных значениях. Избыточный СКО, вызываемый блужданием коэффициентов усиления отводов относительно оптимальных значений, прямо пропорционален числу коэффициентов корректора и мощности шума в канале. Размер шага, обеспечивающий наиболее быструю сходимость, да╦т СКО, который в среднем на 3 дБ выше минимально достижимого. В общем случае, в период настройки корректора размер шага можно выбрать максимально допустимым (исходя из условий быстрой сходимости), а в установившемся режиме (режим при╦ма данных) уменьшить шаг для обеспечения точного отслеживания параметров канала. Корректоры с решающей обратной связьюПростейшим нелинейным корректором, наиболее пригодным для каналов с сильными амплитудными искажениями, является корректор, в котором подавление интерференции от уже обнаруженных символов осуществляется с помощью решающей обратной связи (РОС). Корректор с РОС показан на рис. 2. Скорректированный сигнал представляет собой сумму выходных сигналов прямой и обратной цепей корректора. Прямая ветвь аналогична рассмотренному выше линейному трансверсальному корректору. Решения, вынесенные при оценке скорректированного сигнала, подаются в цепь обратной связи через второй трансверсальный фильтр. Основная идея состоит в том, что если величины уже обнаруженных символов известны (прошлые решения предполагаются верными), то создаваемая этими символами МСИ может быть полностью подавлена пут╦м вычитания (с одновременным взвешиванием) значений прошлых символов из выходного сигнала корректора. Весами служат отсч╦ты, взятые на "хвосте" импульсной характеристики системы, включая канал и прямую цепь корректора.
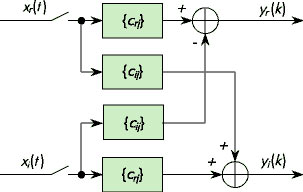
Коэффициенты прямой и обратной цепей можно регулировать одновременно в расч╦те на минимизацию СКО. Уравнение обновления коэффициентов прямой цепи такое же, как и для линейного корректора. Коэффициенты цепи обратной связи регулируются согласно соотношению: dj(k + 1) = dj(k) √ a╥ek╥yk-j, (7) где j = 1, ┘, N2; N2 - общее число коэффициентов цепи обратной связи; yk - решение для k-го символа. Оптимальные по критерию МСКО значения dj - это такие величины, которые в пределах диапазона, перекрываемого цепью обратной связи, снижают МСИ до нуля (подобно тому, как в ФН-корректоре). Заметим, что поскольку выходной сигнал цепи обратной связи корректора с РОС представляет собой взвешенную сумму неискаж╦нных шумом прошлых решений, коэффициенты цепи обратной связи не влияют на мощность шума на выходе корректора. Корректор с РОС при компенсации амплитудных искажений повышает уровень шума в меньшей степени, чем линейный корректор. Кроме того, характеристики корректора с РОС менее чувствительны к фазе дискретизации. Эти преимущества можно объяснить интуитивно следующим образом. Коэффициенты линейного трансверсального корректора выбираются так, чтобы суммарная импульсная характеристика канала и корректора приближалась по форме к единичному импульсу. В корректоре с РОС, благодаря оценке некоторого числа прошлых символов, МСИ полностью подавляется без участия прямой цепи, поэтому на е╦ коэффициенты налагается меньше ограничений. Суммарная импульсная характеристика и прямой цепи может содержать ненулевые отсч╦ты, следующие за главным импульсом. Таким образом, прямая цепь корректора с РОС освобождается от функции аппроксимации обратных характеристик канала, тем самым исключается чрезмерное увеличение уровня шума и чувствительности к фазе дискретизации. Если по цепи обратной связи переда╦тся неверное решение, то в течение нескольких следующих символов (до тех пор, пока неверное решение не пройд╦т по всем отводам линии задержки цепи обратной связи) в выходном сигнале корректора с РОС будет присутствовать ошибка. Следовательно, существует вероятность того, что за первым неверным решением последуют другие, то есть ошибка будет распространяться. К счастью, распространение ошибок в корректоре с РОС не носит катастрофического характера. В типичных каналах ошибки появляются короткими пачками, что лишь незначительно ухудшает качество компенсации. Корректоры для демодуляции КАМ-сигналовДо сих пор рассматривались корректоры АИМ-систем, функционирующих в полосе модулирующих частот. При демодуляции ФМ или КАМ-сигналов выходных сигналы синфазного и квадратурного каналов удобно представить в виде действительной и мнимой частей комплексного сигнала x(t) = xr(t) + j╥xi(t). Корректор с комплексными коэффициентами cj, работающий в полосе модулирующих частот, обрабатывает отсч╦ты комплексного сигнала x(t) и генерирует комплексные скорректированные отсч╦ты y(k) = yr(k) + j╥yi(k). Структурная схема комплексного корректора как набора из четыр╦х действительных трансверсальных фильтров (с перекр╦стными связями) с двумя входами и двумя выходами показана на рис. 3. Действительные коэффициенты crj (n = 0,┘,N-1) служат для подавления межсимвольной интерференции в синфазном и квадратурном каналах, тогда как мнимые коэффициенты cij (n = 0,┘,N-1) противодействуют взаимной интерференции двух каналов. Причиной последней может быть асимметрия характеристик канала относительно несущей. Рисунок 3. Комплексный трансверсальный корректор для КАМ демодулятора
Коэффициенты подбираются так, чтобы минимизировать средний квадрат модуля комплексного сигнала ошибки e(k) = er(k) + j╥ei(k), где er и ei - величины разности между yr и yi и их истинными значениями. Метод обновления коэффициентов, при условии, что начальная расстройка по несущей частоте с точностью до фазы устранена при формировании квадратурных сигналов с помощью схемы восстановления несущей, подобен используемому в АИМ корректоре, за исключением того, что все переменные являются комплексными: cj(k + 1) = cj(k) √ a╥ek╥x*k-j, (8) где x*k-j - комплексно-сопряж╦нное x. В некоторых случаях возможно переполнение коэффициентов корректора (их выход за пределы допустимой области, например, (-1, 1)). Одно из возможных решений предотвращения переполнения заключается в использовании алгоритма утечки cj(k + 1) = (1 √ m)╥cj(k) √ a╥ek╥x*k-j, (9) где в обычный градиентный алгоритм введ╦н множитель ослабления (1 √ m). Для снижения сложности реализации ценой определ╦нного ухудшения рабочих характеристик были предложены более простые процедуры обновления, в которых члены коррекции коэффициентов формируются с помощью нелинейных преобразований. Укажем три алгоритма такого рода: j(k + 1) = cj(k) √ a╥f(ek)╥f(x*k-j), (10) где
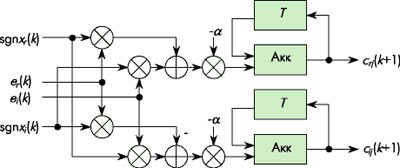
а [log2x.] здесь обозначает наибольшее целое число, меньшее или равное аргументу. В соотношениях (10)√(12) функции f(x) и sgn(x) применяются отдельно к каждому элементу вектора (к действительной и мнимой частям комплексной величины). Результаты анализа и моделирования показывают, что недостатком метода обновления в соответствии с алгоритмом (12) является значительное увеличение времени сходимости по сравнению с исходным алгоритмом (8), тогда как процесс обновления в соответствии с алгоритмами (10) и (11) приводит лишь к небольшому ухудшению рабочих характеристик. Структурная схема устройства, осуществляющего обновление коэффициентов в соответствии, например, с алгоритмом (11), приведена на рис. 4. Здесь Аккаккумулятор. Рисунок 4. Устройство обновления коэффициентов коректора
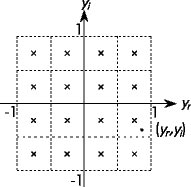
Формирование сигналов ошибки er(k) и ei(k) рассмотрим на примере сигнала КАМ16 (рис. 5) и при условии, что сигналы yr(k) и yi(k) представляются 8-разрядным кодом. Здесь символом "x" отмечено идеальное положение точек сигнального созвездия, а символом "x" - положение точки на текущем тактовом интервале, координаты которой (yr,yi). Пусть значению "-1" на рис. 5 соответствует код 00000000, а значению "1" - код 11111111. В этом случае два старших разряда кодов yr и yi определяют оценки синфазной и квадратурной составляющих переданного символа (yr и yi), а оставшиеся 6 разрядов определяют сигналы ошибки (er и ei). Для представления сигналов ошибки в дополнительном коде необходимо проинвертировать старший разряд (из оставшихся шести). Например, в нашем случае yr = 11101110, yr = 11, а er = 001110; yi = 01011100, yi = 01, а ei = 111100. Рисунок 5. Сигнальное созвездие для сигналов КАМ 16
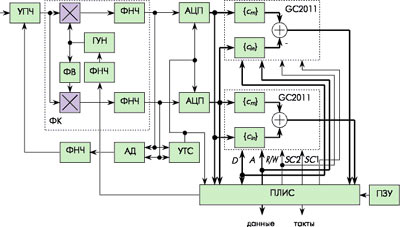
При реализации корректора необходимо задаться количеством отводов в трансверсальных фильтрах N, коэффициентом усиления отводов a, разрядностью входных данных Bx, разрядностью сигналов ошибки Be, разрядностью аккумулятора Bа, разрядностью коэффициентов Bc и разрядностью произведения cj╥xk-j Bz. В [2] показано, что при при╦ме сигналов КАМ256 необходимо выбрать эти параметры следующим образом: N = 7, a = 2-15 (отметим, что допустимый верхний предел a равен ~1/N), Bx = 9, Be = 5, Bа = 17, Bc = 12 и Bz = 13. При этом качество работы корректора ухудшается незначительно по сравнению с идеальным случаем. Очевидно, что при при╦ме сигналов КАМ16 и КАМ64 требования к параметрам корректора менее ж╦сткие. Корректор на микросхемах GC2011/GC2011A фирмы GraychipСтруктурная схема когерентного демодулятора КАМ сигналов с адаптивным корректором МСИ приведена на рис. 6. Демодулятор содержит усилитель промежуточной частоты (УПЧ), коэффициент усиления которого управляется сигналом с выхода амплитудного детектора (АД), формирователь квадратур (ФК), два аналого-цифровых преобразователя (АЦП), устройство тактовой синхронизации (УТС) и линейный трансверсальный корректор МСИ, реализованный на двух микросхемах GC2011 фирмы Graychip и программируемой логической интегральной схеме (ПЛИС) XC4005PQ160 фирмы Xilinx. ФК реализован с помощью двух перемножителей (x), фазовращателя (ФВ) на 90º, генератора, управляемого напряжением (ГУН), и фильтров нижних частот (ФНЧ). ГУН управляется сигналом с выхода фазового детектора схемы восстановления несущей, реализованного в той же ПЛИС. На ПЛИС реализован также дифференциальный декодер демодулятора.
Микросхема GC2011 [3] включает в себя две линейки цифровых трансверсальных фильтров с возможностью их различного конфигурирования и память для хранения значений коэффициентов усиления отводов. Максимальная тактовая частота входных отсч╦тов равна 80 МГц (для GC2011A - 106 МГц), максимальное количество отводов в каждом фильтре - 15. Имеется возможность использовать децимацию на 2 и 4, при этом количество отводов увеличивается соответственно до 31 и 63. Разрядность входных и выходных данных Bx = 12, разрядность коэффициентов Bc = 14 и разрядность произведения cj╥xk-j Bz = 32. Обмен данными между ПЛИС и микросхемами GC2011 осуществляется по шине данных D (управляющие слова, коэффициенты) с помощью управляющих сигналов, формируемых в ПЛИС (сигналы адреса - A, записи/считывания - R/W, выбора кристалла - CS1, CS2). При включении питания из постоянного запоминающего устройства (ПЗУ) в ПЛИС грузится программа, которая определяет е╦ конфигурацию. Затем производится конфигурация микросхем GC2011 и загрузка начальных значений коэффициентов фильтров пут╦м транслирования через ПЛИС исходных данных, хранящихся в ПЗУ. Обновление коэффициентов, в соответствии с выражением (11) и рис. 4, осуществляется ПЛИС в следующем порядке:
После обновления всех коэффициентов производится переключение GC2011 для работы с новыми коэффициентами, и цикл вычислений начинается заново. Период обновления коэффициентов определяется в основном длительностью цикла считывание/запись микросхемы GC2011, минимальное значение которой равно 160 нс, и пропорционален количеству отводов фильтров корректора. Так, например, при тактовой частоте 40 МГц и 7-отводных фильтрах корректора период обновления составляет ~ 5,3 мкс, другими словами, обновление коэффициентов происходит примерно через каждые 200 тактов. При необходимости, можно использовать внешнюю высокоскоростную память для хранения коэффициентов, в этом случае время обновления коэффициентов корректора уменьшается почти вдвое. T-интервальный корректор может быть использован в демодуляторах сигналов от ФМ4 до КАМ256 с тактовой частотой до 80 МГц (количество отводов до 15). T/2-интервальный корректор может быть использован в демодуляторах сигналов от ФМ4 до КАМ256 с тактовой частотой до 40 МГц (количество отводов до 31). К недостатку этих корректоров следует отнести относительно медленное обновление коэффициентов корректора (на высоких тактовых частотах один раз за несколько сотен тактов), связанное с большой длительностью цикла считывание/запись микросхемы GC2011. Это, впрочем, вполне допустимо, так как изменение параметров частотно-селективных замираний сигнала происходит со значительно меньшей скоростью. К достоинствам описанного корректора, по сравнению, например, с корректором, реализованным полностью на ПЛИС 4000 серии фирмы Xilinx, следует отнести лучшие рабочие характеристики, меньшие габариты и энергопотребление, его универсальность. На одной и той же аппаратной части можно реализовать как T-, так и T/2-интервальный корректор, который может работать с сигналами от ФМ4 до КАМ256. Более того, количество отводов в трансверсальных фильтрах корректора легко меняется программным способом. Литература.
|
|
|
 |
 |
PDFs | Новости | Литература | Схемы | Форум | Блоги | Реклама |
Чипинфо
 Адаптивная коррекция межсимвольных искажений.
Адаптивная коррекция межсимвольных искажений.