|
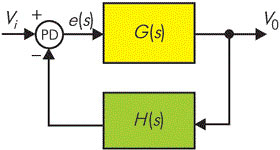
О. Стариков Метод ФАПЧ и принципы синтезирования высокочастотных сигналовСистема фазовой автоматической подстройки частоты, далее ФАПЧ (зарубежная аббревиатура Phase - Locked Loop, PLL), представляет собой самостоятельный узел, входящий в состав различной аппаратуры связи, систем спутникового вещания и передачи данных, а также в состав устройств, являющихся стабильными источниками сигналов. Первая система ФАПЧ была разработана в 1930 году французским инженером Беллизом. Однако широкое применение она получила в 1960 году с появлением первых интегрированных ФАПЧ компонентов. Существовало традиционное предубеждение против ФАПЧ, связанное отчасти со сложностью реализации е╦ на дискретных компонентах, а отчасти - с сомнениями относительно над╦жности е╦ работы. Со временем, когда стали появляться высокоинтегрированные компоненты, реализующие на одном кристалле практически все необходимые (за исключением некоторых внешних элементов) узлы ФАПЧ, эта система, при правильном и корректном проектировании, стала достаточно над╦жным и заслуживающим внимания узлом. Систему ФАПЧ можно представить как систему с отрицательной обратной связью, содержащую коэффициент усиления в прямом направлении G(s) и коэффициент обратной cвязи H(s), а также значение e(s), характеризующее разностный сигнал между входным сигналом Vi и сигналом цепи обратной связи V0. Передаточная функция замкнутого контура цепи ООС (рис. 1) будет иметь вид:
где, GCL - коэффициент передачи замкнутого контура (от Gain Closed Loop).
где Рисунок 1. Стандартная модель системы отрицательной обратной связи (ООС)
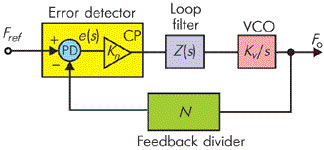
Фазовый детектор PD (Phase Detector) производит сравнение двух частотных сигналов и формирует выходной сигнал, пропорциональный их фазовой разности. Этот разностный сигнал есть сигнал ошибки, который характеризует стабильность системы, и в установившемся режиме его значение стремится к нулю. Иначе говоря, система стабильна, когда значение e(s) равно нулю. Следовательно, данная система, а соответственно и система ФАПЧ, является автоматической системой регулирования или следящей системой, а мерой регулирования частоты является разность фаз входного (опорного) сигнала и сигнала цепи обратной связи. Далее можно сделать следующий вывод: в системе ФАПЧ осуществляется интегрирование; мы измеряем фазу (разность фаз), а регулируем частоту, но фаза является интегралом от частоты. Рассмотрим теперь стандартную базовую модель ФАПЧ (рис. 2) и входящие в е╦ состав компоненты:
Рисунок 2. Базовая модель ФАПЧ
В фазовом детекторе, как было сказано выше, происходит сравнение двух частотных сигналов и формируется выходной сигнал, пропорциональный их фазовой разности. Когда оба сигнала равны по фазе и частоте, сигнал ошибки будет равен нулю, и контур "замыкается". Можно привести следующее уравнение, характеризующее значение сигнала ошибки e(s): e(s) = Fref √ (F0/N), (3) когда e(s) = 0, Fref = F0/N, (4) отсюда следует F0 = N·Fref. (5) Когда F0 Этот усиленный и отфильтрованный сигнал фазовой ошибки в виде управляющего напряжения, в свою очередь, будет управлять VCO, частота которого будет увеличиваться или уменьшаться по мере необходимости на значение Kv Чтобы несколько прояснить ситуацию, верн╦мся немного назад. Частотой VCO можно управлять, подавая на его вход соответствующее напряжение. Здесь, казалось бы, можно поступить так же, как и в любом усилителе с обратной связью - ввести контур регулирования с некоторым коэффициентом передачи, как это делается при проектировании схем на операционных усилителях. Но имеется одно важное отличие: в схемах на операционных усилителях регулируемая с помощью обратной связи величина совпадала с величиной, измеряемой с целью формирования сигнала ошибки или была хотя бы пропорциональна ей. Так, например, в усилителях напряжения измеряется выходное напряжение и соответствующим образом подстраивается входное. Несколько иная ситуация для системы ФАПЧ, так как здесь мы измеряем фазу, а регулируем частоту, то есть как было сказано выше, происходит интегрирование, за сч╦т которого появляется тот самый фазовый сдвиг. Однако необходимо заметить, что операционные усилители имеют запаздывание по фазе на 90º почти на вс╦м сво╦м частотном диапазоне, но при этом хорошо работают. Чтобы не включать в контур элементы, вносящие дополнительное запаздывание по фазе, можно предложить и проанализировать один из вариантов построения контура регулирования, так называемый "контур первого порядка", при котором в качестве источника тока выступает операционный усилитель, но исключается из схемы фильтр низких частот. При таком построении схемы вход VCO непосредственно связан с выходом источника тока на операционном усилителе, что не позволяет сглаживать помехи и флуктуации входного сигнала, так как данная схема не обладает так называемым свойством "маховика", которое обеспечивается благодаря введению фильтрации по низкой частоте. К тому же, "контур первого порядка" не сохраняет постоянным фазовое соотношение между опорным сигналом и сигналом VCO по той самой причине, что выход источника тока непосредственно соедин╦н со входом VCO. Из всего сказанного выше можно предположить, что "контуры первого порядка" не годятся для построения контуров регулирования цепи ФАПЧ. Следующий подход - это использование "контура второго порядка", в который вводится дополнительная фильтрация по низкой частоте. Такой контур обладает необходимым свойством "маховика", сглаживая тем самым помехи и флуктуации входного сигнала, к тому же он уменьшает полосу захвата, при попадании в которую частота VCO начинает стабилизироваться системой ФАПЧ. Существует также и полоса удержания, то есть максимальная полоса расстройки VCO, в которой замкнутый контур ФАПЧ стабилизирует частоту VCO. Ширина полос захвата и удержания зависит как раз от вида частотно-фазовой характеристики фильтра нижних частот и общего коэффициента передачи контура регулирования. В правильно спроектированной системе ФАПЧ полоса удержания больше или равна полосе захвата, система стабильна и не самовозбуждается. Здесь необходимо также отметить, что при введении фильтрации по низкой частоте несколько увеличивается и время захвата, которое характеризует скорость вхождения в захват и удержание системы ФАПЧ в режиме слежения при резком изменении частоты. Анализируя сказанное выше, можно сделать вывод, что для системы ФАПЧ подходят "контуры второго порядка", которые обеспечивают малые флуктуации фазы выходного сигнала, а также обладают некоторыми свойствами памяти или "маховика". Полная передаточная функция для ФАПЧ может быть представлена при помощи выражения GCL для системы отрицательной обратной связи:
Здесь вводим дополнительное понятие Forward Gain, обозначенное через G, как коэффициент, характеризующий усиление в прямом направлении, и понятие Loop Gain, обозначенное через GH, как коэффициент передачи контура.
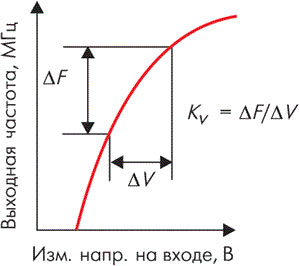
Когда величина GH больше единицы, можно говорить, что контур замыкается, и передаточная функция для системы ФАПЧ с коэффициентом деления N имеет вид: Fout = N x Fref. (9) На рис. 3 представлена зависмость выходной частоты VCO от изменения напряжения на входе. Рисунок 3. Передаточная характеристика VCO
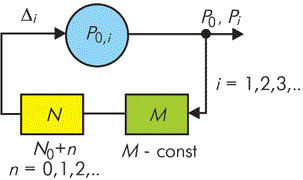
Прежде чем приступить к рассмотрению методов синтезирования сигналов, желательно рассмотреть некую несколько отвлеченную модель (рис. 4), показывающую процесс формирования последовательности целочисленного (Integer) потока данных. Рисунок 4. Модель, отображающая процесс формирования потока данных
На рис. 4 обозначены:
При первоначальном запуске системы, то есть при i = 1 и n = 0, P0 будет иметь какое-то фиксированное значение, которое "пройдя" через делители M и N, даст нам значение Певоначальное зачение
Последовательность значений
или, несколько упростив, получим:
Выражение в скобках ( Значение Pi можно представить как Pi = P0 + или Pi = Pi-1 + Выражения (12) и (14) показывают взаимосвязь между значениями коэффициентов деления делителей M и N, первоначальным значением системы P0, его последующем увеличением и значением приращения Литература
|
|
|
 |
 |
PDFs | Новости | Литература | Схемы | Форум | Блоги | Реклама |
Чипинфо
 Метод ФАПЧ и принципы синтезирования высокочастотных сигналов.
Метод ФАПЧ и принципы синтезирования высокочастотных сигналов.