|
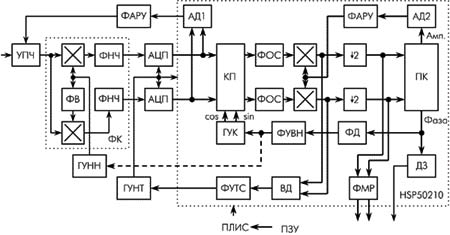
А. Парамонов, О. Куропаткин, И. Сосенко Выбор параметров фильтров устройств автоматического регулирования демодуляторов ФМ сигналов при их реализации на микросхемах фирмы IntersilВведение Структурная схема простейшего варианта цифрового когерентного демодулятора сигналов ФМ4 на микросхеме HSP50210 (Digital Costas Loop) фирмы Intersil приведена на рис. 1. Демодулятор содержит усилитель промежуточной частоты (УПЧ), коэффициент усиления которого управляется сигналом с выхода амплитудного детектора (АД1) через фильтр устройства автоматической регулировки усиления (ФАРУ), формирователь квадратурных сигналов (ФК), два аналого-цифровых преобразователя (АЦП), генератор несущей частоты сигнала, управляемый напряжением (ГУНН), генератор удвоенной тактовой частоты сигнала, управляемый напряжением (ГУНТ), программируемую логическую интегральную схему (ПЛИС), постоянное запоминающее устройство (ПЗУ) и устройство цифровой обработки сигналов, реализованное на микросхеме HSP50210. Рисунок 1. Структурная схема когерентного демодулятора сигналов ФМ4 на микросхеме HSP50210 фирмы Intersil
ФК реализован с помощью двух перемножителей (x), фазовращателя (ФВ) на 90º и двух фильтров нижних частот (ФНЧ). Загрузка конфигурации микросхемы HSP50210 осуществляется с помощью ПЛИС и ПЗУ, в котором записаны параметры конфигурации. Микросхема HSP50210 [1] содержит амплитудный детектор (АД1) для внешнего устройства автоматической ре-гулировки усиления (АРУ), комплексный перемножитель (КП), фильтры основной селекции (ФОС), внутреннее устройство АРУ, в состав которого входят перемножители (x), устройства децимации на два ( Максимальное значение частоты дискретизации квадратурных сигналов, подаваемых на вход микросхемы, равно 52 МГц, при этом максимальная скорость передачи информации в радиолинии с таким демодулятором составляет 52 Мбит/с. Рассмотренный демодулятор содержит четыре устройства автоматического регулирования: два устройства АРУ (внешнее и внутреннее), УТС и УВН. В данной статье приводятся рекомендации по выбору параметров фильтров устройств автоматического регулирования демодулятора. Блоки микросхемыАмплитудный детектор входного сигнала (АД1)Амплитудный детектор устройства АРУ, в общем случае, должен формировать сигнал ошибки пут╦м сравнения амплитуды комплексного входного сигнала где Ik и Qk - отсч╦ты квадратурных выборок сигнала, с некоторым порогом. В данном частном случае АД1 формирует одноразрядный сигнал ошибки для внешнего устройства АРУ и использует более простой в реализации (но менее точный) алгоритм оценки амплитуды:
где множитель 0,375 = 1/4 + 1/8 реализуется весьма просто. С использованием этого алгоритма, амплитуда комплексного сигнала измеряется с ошибкой, не превышающей 0,55 дБ (6,5%). Генератор отсч╦тов синуса и косинуса, управляемый кодом (ГУК)ГУК состоит из фазового аккумулятора ╦мкостью M = 232 и ПЗУ, в котором записаны значения синуса/косинуса. Формирование отсч╦тов синуса/косинуса осуществляется следующим образом. С частотой дискретизации fд фазовый аккумулятор вычисляет код текущей фазы пут╦м добавления к текущему содержимому фазового аккумулятора приращения CF, хранящегося в Carrier Frequency (CF) регистре, а затем из ПЗУ выбирается число, пропорциональное значению синуса/косинуса при этой фазе. (Изменение содержимого фазового аккумулятора от 0 до 232 соответствует изменению фазы от 0 до 360º.) Содержимое 32-разрядного CF-регистра определяется сигналом на выходе ФУВН. CF-регистр устанавливает частоту ГУК в соответствии со следующим равенством: fC = f Например, если в CF-регистр загружено число 4000 0000 (Hex), и частота дискретизации равна 40 МГц, то ГУК формирует квадратурные отсч╦ты на частоте 10 МГц. Когда CF отрицательная величина, вектор косинуса/синуса вращается по часовой стрелке, в противном случае - против часовой стрелки. Фильтры основной селекции (ФОС)ФОС представляют собой либо интеграторы со сбросом (ИС) (используются для сигналов с прямоугольной огибающей), либо фильтры с частотной характеристикой, соответствующей корню квадратному из приподнятого косинуса с коэффициентом скругления спектра, равным 0,4 (ПК). ПК фильтр представляет собой 15-отводный КИХ-фильтр с постоянными коэффициентами. Если характеристики этих фильтров не устраивают разработчика, то фильтры с требуемыми частотными характеристиками можно реализовать на отдельной микросхеме HSP43168 (Dual FIR Filter). При использовании ПК-фильтра частота дискретизации квадратурных сигналов должна быть равна удвоенной тактовой частоте сигнала. При использовании ИС фильтра частота дискретизации может быть в 4, 8, 16 или 32 раза больше тактовой частоты сигнала, фильтр работает в режиме децимации - частота дискретизации выходных сигналов фильтра равна удвоенной тактовой частоте сигнала. Преобразователь прямоугольных координат в полярные (ПК)ПК формирует из квадратурных отсч╦тов Ik и Qk отсч╦ты Ak и Pk, пропорциональные амплитуде и фазе комплексного сигнала:
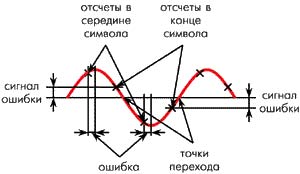
Фильтр внутренней петли АРУ (ФАРУ)ФАРУ представляет собой аккумулятор. Временной детектор (ВД)ВД формирует сигнал ошибки для управления частотой ГУНТ с точностью до фазы для взятия отсч╦тов квадратурных сигналов в оптимальные моменты времени. На вход ВД поступают отсч╦ты квадратурных сигналов с удвоенной тактовой частотой сигнала, то есть отсч╦ты в конце и в середине символов, как это показано на рис. 2 (последовательность символов 101 для одного из квадратурных сигналов). Сигнал ошибки (с точностью) до знака равен отсч╦там сигнала в конце символа. В состав ВД входит детектор переходов, в котором сначала выносится решение о знаке принимаемого символа (1 или 0), а затем о наличии и направлении перехода символов на двух соседних тактовых интервалах. Решение о наличии перехода принимает значения: 0 - переход отсутствует, 1 - переход присутствует. Решение о направлении перехода принимает значения: 1 - переход из 0 в 1, -1 - переход из 1 в 0. Сигнал ошибки на выходе ВД формируется пут╦м перемножения отсч╦та сигнала в конце символа на решение о наличии перехода и на решение о направлении перехода. В частности, когда переход отсутствует, сигнал ошибки равен нулю. Ошибки, сформированные в каждом из квадратурных каналов, суммируются, и результат делится на два. Рисунок 2. Формирование сигнала ошибки в ВД
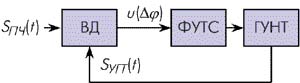
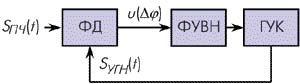
Сигнал ошибки ВД, формируемый на каждом тактовом интервале, пода╦тся на аккумулятор ошибки. Последний необходимо использовать для накопления сигнала ошибки в случае, когда тактовая частота сигнала превышает 1/8 f Фазовый детектор (ФД)Сигнал ошибки на выходе ФД формируется пут╦м снятия фазовой модуляции с сигнала Pk на выходе преобразователя прямоугольных координат в полярные. Для снятия фазовой модуляции PБыгиЮл поворачивается на угол Фильтры УТС и УВН (ФУТС и ФУВН)ФУТС и ФУВН являются фильтрами второго порядка и содержат пропорциональную и интегрирующую ветви, сигналы с выходов которых суммируются. Математическая модель УТС и УВНСтруктурная схема УТС приведена на рис. 3. Сигнал на выходе временного детектора УТС является функцией разности фаз Рисунок 3. Структурная схема УТС
Структурная схема УВН приведена на рис. 4. Здесь рассматривается случай, когда УВН замкнуто через ГУК, при этом частота сигнала на выходе ГУНН является фиксированной, равной номинальному значению несущей частоты. Сигнал на выходе фазового детектора УВН является функцией разности фаз Рисунок 4. Структурная схема УВН
Составим математическую модель этих устройств. Выходные сигналы ВД и ФД, при действии на их входах полезного сигнала и шумовой помехи, можно представить в виде суммы: u(x) = F(x) + В нашем случае, ВД и ФД являются цифровыми устройствами, то есть сигналы на их выходах квантованы по времени и по уровню. При этом шумовая составляющая сигнала на выходе детектора является последовательностью двуполярных импульсов со случайными амплитудами. Длительность импульсов равна T = 1/fт, где fт - тактовая частота сигнала. Амплитуды импульсов можно считать некоррелированными случайными величинами со средним значением, равным нулю, и дисперсией Отсюда флуктуационная характеристика S(0,x) = 2 Вывод аналитических выражений для ДХ и ФХ представляет собой, как правило, очень сложную математическую задачу. Поэтому зависимости F(x) и S(0,x) обычно получают методом статистического моделирования детекторов. При малых значениях ошибки характеристика F(x) обычно линейна и записывается в виде F(x) = SД╥x, где SД = dF(x)/dx|x=0 - крутизна характеристи-ки детектора. Форма дискриминационной характеристики и е╦ крутизна зависят не только от параметров детектора, но и от отношения сигнал/шум на входе детектора. При уменьшении этого отношения максимумы дискриминационной характеристики и е╦ крутизна уменьшаются. Цифровой фильтр УТС и УВН работает в соответствии со следующим алгоритмом:
Этот фильтр эквивалентен параллельному соединению пропорционального и дискретного интегрирующего (суммирующего) звеньев с коэффициентами k1 и k2, соответственно. В качестве управляемых генераторов (ГУНТ и ГУНН) могут быть использованы LC или кварцевые генераторы, частота генерации которых управляется с помощью варикапа. Наиболее часто используемой моделью таких генераторов является идеальный интегратор с операторным коэффициентом передачи: KУГ(p) = 2 Инженерный расч╦т цифровых УТС и УВН может быть провед╦н с помощью приближ╦нного квазинепрерывного метода. Суть метода заключается в замене передаточных функций цифровых фильтров и ГУК их непрерывными аналогами (такая замена допустима при условии, что полоса пропускания устройства во много раз меньше тактовой частоты fт = 1/T). Заменяя в (4) дискретные величины непрерывными, а сумму интегралом, получим: KФНЧ(p) = k1 + k2/(pT) = k(1 + pT1)/p (6) где k = k2/T, T1 = k1T/k2. Найд╦м теперь передаточную функ-цию непрерывного аналога ГУК. Как следует из (2), изменение управляющего кода на единицу приводит к отклонению частоты на f KГУК(p) = 2 то есть модель ГУК совпадает с моделью аналоговых генераторов (5) при условии, что SУГ = f Сигнал на выходе детектора формируется, как правило, с некоторой задержкой относительно входных сигналов, что обусловлено конечным временем обработки входных сигналов в детекторе (в основном, в фильтрах демодулятора). В соответствии со сказанным, математическую модель УТС и УВН можно представить в виде, привед╦нном на рис. 5, где KЛ(p) = KЗЗ(p)╥KФНЧ(p)╥KУГ(p), где KЗЗ(p) = exp(-p Рисунок 5. Математическая модель УТС и УВН
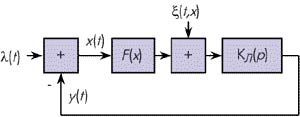
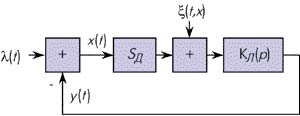
В случае малых значений ошибки слежения, для анализа можно использовать линейную модель УТС и УВН (рис. 6). При этом выполняются следующие соотношения: x(t) = Отсюда сигнал y(t) на выходе следящего устройства и сигнал ошибки x(t) определяются выражениями:
Как следует из выражения (8), коэффициент передачи замкнутого устройства равен: При этом сигнал y(t) на выходе устройства можно представить в виде: Рисунок 6. Линейная модель УТС и УВН
Рассмотрим частный случай, когда KЛ(p) = KФНЧ(p)· KУГ(p) (то есть когда влиянием звена задержки можно пренебречь), а KФНЧ(p) и KУГ(p) определяются выражениями (6) и (7). При этом имеем: то есть устройство описывается дифференциальным уравнением второго порядка и характеризуется параметрами: Данное устройство устойчиво при любых значениях параметров k Коэффициент демпфирования определяет форму переходных процессов в устройстве. Для удовлетворительного качества переходных процессов необходимо обеспечить значение коэффициента демпфирования x = 0,5┘1. При x > 1 переходные процессы в устройстве носят апериодический характер, при При шумовом входном воздействии дисперсия ошибки слежения в установившемся режиме определяется выражением: где
Здесь В рассматриваемом случае:
Устройство имеет два регулируемых параметра: kS и T1. Их значения можно определить, например, из следующей системы уравнений:
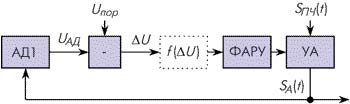
где допустимое значение дисперсии ошибки слежения (sxдоп)2 определяется исходя из допустимых энергетических потерь при выделении информации. Следует отметить, что анализ устройств с задержкой в петле регулирования сложен и требует отдельного рассмотрения. Известные результаты анализа подобных устройств показывают, что наличие задержки может привести к неустойчивой работе, к увеличению шумовой полосы и к уменьшению полосы захвата устройства. Математическая модель устройства АРУСтруктурная схема внешнего устройства АРУ приведена на рис. 7. Здесь сигнал промежуточной частоты SПЧ(t) проходит через управляемый аттенюатор (УА) усилителя промежуточной частоты и поступает на амплитудный детектор (АД1). АД1 измеряет амплитуду сигнала SA(t). Из выходного сигнала АД1 UАД вычитается пороговое напряжение Uпор, величина которого определяет требуемую амплитуду сигнала SA(t) в установившемся режиме работы устройства АРУ. Во внешнем устройстве АРУ разностный сигнал Рисунок 7. Структурная схема устройства АРУ
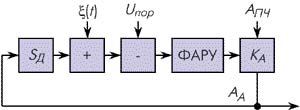
Структурная схема внутреннего устройства АРУ имеет аналогичный вид. Здесь вместо УА используются перемножители микросхемы HSP50210, и отсутствует нелинейный преобразователь f( Составим математическую модель устройства АРУ. Выходной сигнал АД, при действии на его входе полезного сигнала и шумовой помехи, можно представить в виде суммы: UАД = SД·AA + Во внешнем устройстве АРУ можно использовать, например, аналоговый ФНЧ (ФАРУ) с операторным коэффициентом передачи KФНЧ(p) = k(1 + pT1)/p (13) Во внутреннем устройстве АРУ в качестве ФНЧ используется аккумулятор. Операторный коэффициент передачи непрерывного аналога цифрового аккумулятора определяется выражением KФНЧ(p) = k/pT (14) Математическая модель устройства АРУ приведена на рис. 8, где KA - регулировочная характеристика УА (зависимость коэффициента передачи УА от управляющего напряжения). Рисунок 8. Математическая модуль УАРУ
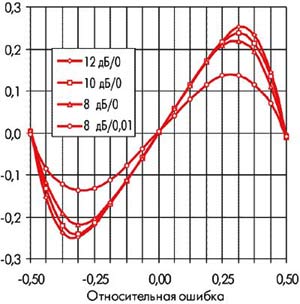
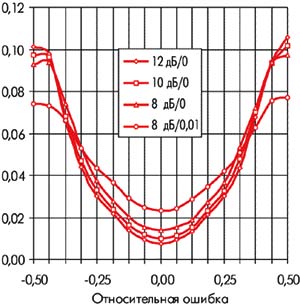
Представим регулировочную характеристику УА прямой линией KA = SA╥Uупр. Тогда Пусть операторный коэффициент передачи ФНЧ определяется выражением (13). В этом случае переходной процесс в устройстве носит апериодический характер (ошибка слежения уменьшается по закону exp(-k Если в качестве ФНЧ используется аккумулятор (14), то ошибка слежения уменьшается по закону exp(-k Отличительной особенностью устройств АРУ является зависимость его параметров (длительность переходного процесса, эффективная полоса) от амплитуды входного сигнала AПЧ. Качество работы устройства АРУ принято характеризовать динамическим диапазоном изменения выходного сигнала Dвых, который в рассматриваемом случае можно определить следующим образом: Dвых = (AAном + 3· Дискриминационные и флуктуационные характеристикиОпределение дискриминационных и флуктуационных характеристик осуществлялось методом компьютерного статистического моделирования детекторов. Моделирование проводилось для канала с частотной характеристикой типа "приподнятый косинус" с коэффициентом скругления 0,4 при тр╦х значениях отношения энергии, приходящейся на бит информации, к спектральной плотности мощности аддитивного шума qБ: 12, 10 и 8 дБ. Мощность сигнала в отсч╦тных точках при идеальной синхронизации принята равной 1. На рис. 9 и 10 представлены полученные дискриминационные F(x) и нормированные флуктуационные S(0,x)/2T характеристики (x = Рисунок 9. ДХ ВД
Рисунок 10. ФХ ВД
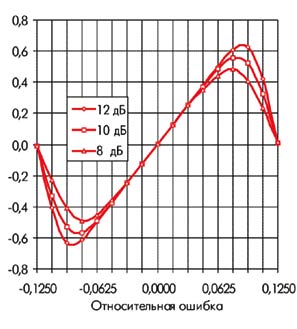
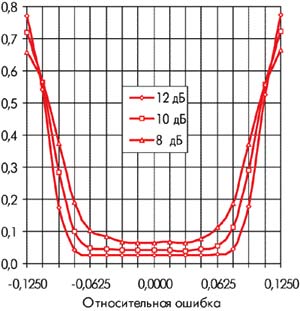
На рис. 11 и 12 представлены полученные дискриминационные F(x) и нормированные флуктуационные S(0,x)/2T характеристики фазового детектора УВН. Рисунок 11. ДХ ФД
Рисунок 12. ФХ ФД
Моделирование дискриминационных и флуктуационных характеристик амплитудного детектора устройства АРУ показало, что дискриминационные характеристики (зависимость амплитуды комплексного сигнала от уровня квадратурных отсч╦тов, нормированного к его номинальному значению, равному S(0,x)/2T = 0,81²/(4╥qБ) (15) Выбор параметров устройств автоматического регулированияВыберем параметры фильтров устройств автоматического регулирования демодулятора сигналов ФМ4 при условии, что скорость передачи информации равна 20 Мбит/с (fт = 10 МГц), а рабочее отношение сигнал/шум qБ = 10 дБ. Устройство тактовой синхронизацииКоэффициенты пропорциональной и интегрирующей ветвей фильтра УТС в микросхеме HSP50210 представляются как мантисса и экспонента. Мантисса M - 4-разрядная величина, с помощью которой сигнал на входе фильтра умножается на коэффициент, принимающий значения в диапазоне от 1 до 1,9775. С помощью экспоненты E (5-разрядная величина) входной сигнал можно умножить на коэффициент, принимающий значения от 2-1 до 2-32. Вместе мантисса и экспонента обеспечивают умножение входного сигнала на коэффициент, принимающий значения в диапазоне от 2-32 до 1: k = (1,0 + M·2-4)·2-(32-E) (16) где M принимает значения от 0 до 15 и E принимает значения от 0 до 31. Например, если M = 0101 и E = 00110, то k = 1,3125·2-26. Имеется возможность задать верхний и нижний пределы сигнала на выходе интегрирующей ветви, что обеспечивает изменение тактовой частоты ГУНТ в пределах, заданных пользователем. Если выходной сигнал интегрирующей ветви выходит за пределы верхнего или нижнего пределов, то на выходе этой ветви формируется сигнал, равный этому пределу. Выберем значения коэффициентов k1 и k2 пропорциональной и интегрирующей ветвей фильтра УТС. Из (12) следуют соотношения для определения этих параметров:
где kL = 2 По результатам моделирования имеем: SД = 0,9136/2 kL = 0,9136╥105 ~ 9,136╥105;
Подставляя полученные значения в формулу (17), при x = 1 получим k1 = (4/5)╥4╥17,3╥103/9,136╥105 ~ 6,06╥10-2. Ближайшее возможное значение k1 ~ 6,05╥10-2, что соответствует мантиссе M1 = 15 и экспоненте E1 = 27. k2 = 9,136·105·(6,05╥10-2)²/(4·107) ~ 8,37·10-5. Ближайшее возможное значение k2 ~ 8,39╥10-5, что соответствует мантиссе M2 = 6 и экспоненте E2 = 18. Устройство восстановления несущей частотыФильтр УВН аналогичен фильтру УТС. Выберем значения коэффициентов k1 и k2 пропорциональной и интегрирующей ветвей фильтра УВН. По результатам моделирования имеем: SД = 8,07/2 S(0,x) При энергетических потерях 0,2 дБ SУГ = f Отсюда получаем: kL = 8,07╥107;
Подставляя полученные значения в формулу (17), при k1 = (4/5)·4·33·10³/8,07·107 ~ 1,31·10-3. Ближайшее возможное значение k1 ~ 1,28╥10-3, что соответствует мантиссе M1 = 5 и экспоненте E1 = 22. k2 = 8,07·107·(1,28·10-3)²/(4·107) ~ 3,31·10-6. Ближайшее возможное значение k2 ~ 3,34·10-6, что соответствует мантиссе M2 = 12 и экспоненте E2 = 13. Устройство автоматической регулировки усиленияДля конфигурирования внутреннего устройства АРУ необходимо задать пять параметров. Параметр AGC Threshold (порог) определяет требуемую амплитуду сигнала на входе преобразователя координат и сигнал ошибки в устройстве АРУ. Этот параметр связан с детектором ошибки и представляется в 8-разрядном формате с фиксированной запятой без знака: 202-12-22-32-42-52-62-7. Хотя этот формат обеспечивает область значений порогов от 0 до 1,9961, преобразователь прямоугольных координат в полярные умножает амплитуду сигнала на коэффициент 0,81. Таким образом, если полная шкала комплексного (I и Q) входного сигнала равна ±1, то максимальное значение амплитуды на выходе преобразователя будет равно 1,1455. Усиление в устройстве АРУ определяется выражением: k = [M·2БыгзЮ-4]·[2-(7+E)] (18) где мантисса M - 4-разрядная величина, обеспечивающая масштабирование сигнала ошибки в пределах от 0 до 0,9375 с разрешением 0,0625, а экспонента E - 3-разрядная величина, обеспечивающая масштабирование сигнала ошибки в пределах от 2-7 до 2-14. Аккумулятор фильтра петли имеет внутренние верхний и нижний ограничители. Верхний предел, нижний предел и управляющий сигнал, подаваемый на перемножители, (выход АРУ) представляются в формате, показанном на рис. 13. Этот формат нельзя смешивать с подобным форматом, используемым для усиления петли АРУ. Сигнал на входе фильтра АРУ (11 знаков "G") показан на рис. 13 для того, чтобы показать вес входного сигнала относительно выходного сигнала. 8 старших разрядов аккумулятора отображаются в формате экспоненты "e" и мантиссы "m", который используется для установки верхнего и нижнего пределов. 6-разрядный без знака формат для мантиссы соответствует диапазону управляющего сигнала АРУ от 0 до 0,9844 с разрешением 0,015625. 2-разрядный формат для экспоненты соответствует диапазону управляющего сигнала АРУ от 0 до 3. Рисунок 13. Формат представления управляющего сигнала
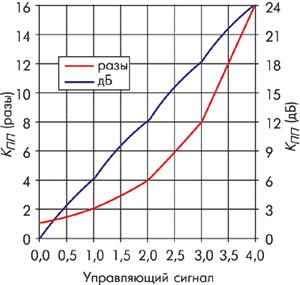
Зависимость коэффициента передачи перемножителей KПП от управляющего сигнала АРУ определяется соотношением: KПП (разы) = (1,0 + m)(2e) (19a) где m и e - значения мантиссы и экспоненты. Эти равенства показывают, что коэффициент передачи перемножителей может меняться в диапазоне от 1 до 1,9844·(2³), что в логарифмическом масштабе соответствует диапазону от 0 до 24 дБ. Рис. 14 отображает регулировочную характеристику перемножителей, рассчитанную по формулам (19) для линейного и логарифмического масштабов. Рисунок 14. Зависимость KПП от управляющего сигнала
Выберем порог АРУ. Обычно номинальные значения сигналов I и Q составляют половину от максимального значения. Считая, что максимальные значения равны ±1, получим, что значение порога 0,81╥ Выберем значения коэффициента k фильтра устройства АРУ: k = 4 где Пусть динамический диапазон входного сигнала составляет 20 дБ. При этом амплитуда сигнала AA на входе преобразователя координат может меняться в пределах от 0,05 до 0,5. Крутизна дискриминационной характеристики SД = 0,81 (коэффициент при преобразовании координат). Крутизну регулировочной характеристики SA возьм╦м равной примерно 4 (определена из Рис. 14). Предположим, что энергетические потери в помехоустойчивости демодулятора за сч╦т колебания уровня сигнала не должны превышать 0,2 дБ. При этом Dвых < 0,41 дБ. Отсюда, должно выполняться следующее неравенство:
Из формулы (15) при qБ = 10 дБ и fт = 10 МГц имеем S(0,x) = 3,28·10-9. Отсюда получаем:
Ближайшее возможное значение k равно ~ 3,66·2-4, что соответствует мантиссе M = 15 и экспоненте E = 1. Литература:
|
 (1)
(1)
 (17)
(17)