

|
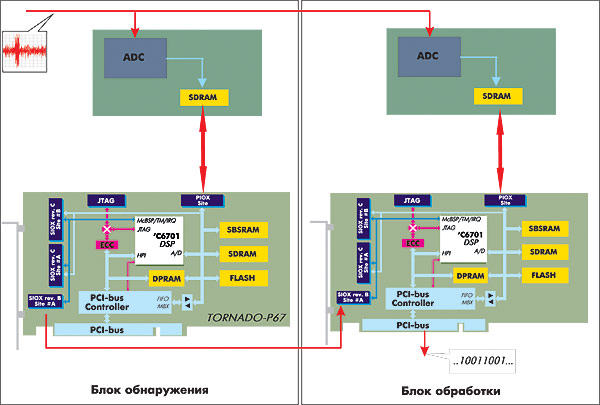
К. Жучков, С. Хоружий Реализация эффективных алгоритмов обнаружения и обработки на цифровом сигнальном процессоре платформы TMS320C6000В статье описано решение задачи оценки параметров радиоимпульсных сигналов при обнаружении с адаптивной коррекцией порога. Рассмотрен ряд алгоритмов, реализованных на цифровом сигнальном процессоре TMS320C6701 и представлена степень эффективности их использования. Характерной особенностью решаемой задачи является высокая скорость обрабатываемого потока данных (до 80 Мбайт/с). Проведена проверка работоспособности программ на реальных сигналах. Введение Успехи в развитии современных науко╦мких технологий в области цифровых процессоров обработки сигналов (DSP) позволили разработчикам решать ряд совершенно новых для цифровой обработки задач реального времени при высоких плотностях потока данных. Разработанная фирмой Texas Instruments платформа С6000 призвана обеспечить максимальную производительность для приложений, требующих предельных скоростей вычислений как с фиксированной, так и с плавающей запятой. За первое отвечают семейства TMS20C62xx и TMS320C64xx с серийным быстродействием до 4800 МIPS, за второе ≈ семейство TMS320C67xx производительностью до 1,3 GFLOPS. Очень важно, что все семейства платформы программно совместимы. Однако, для достижения заявленных характеристик процессоров платформы С6000 перед разработчиком вста╦т задача построения высокоэффективных алгоритмов, адаптированных к архитектуре процессора. При оценке эффективности таких алгоритмов в качестве критериев оптимальности используют минимум количества арифметических и логических операций и максимум заполнения процессорного конвейера (за такт процессора можно выполнить до 8 ассемблерных инструкций) при реализации кода. Одной из задач, требующей реализации высокоэффективных алгоритмов цифровой обработки сигналов, является задача обнаружения коротких радиоимпульсов. Область приложения в последнее время значительно расширяется, охватывая, например, радиолокацию и связь, исследования плазменных нестационарностей [1], рентгеновскую [2] и ЯМР спектроскопию [3] и ряд других областей науки и техники. Существует ряд подходов к созданию устройств обработки радиоимпульсов, однако, при обработке импульсных сигналов с высокой скважностью комплекс обработки обычно строят следующим образом: импульсный сигнал сначала обнаруживают во входном потоке данных, а затем производят обработку короткого участка реализации, в котором находится либо импульс, либо пачка импульсов. Схема построения обнаружителя и, следовательно, его помехоустойчивость прямо зависят от априорно известной информации о сигнале. При постановке задачи мы смоделировали сигнальную обстановку, в которой некоторые параметры сигнала известны (например, длительность импульса, параметры внутриимпульсной модуляции, средняя плотность потока импульсов), но многое в сигнальной обстановке неопределено (наличие мешающих импульсных и непрерывных помех, реальные соотношения сигнал/шум, начальная фаза периодичности следования импульсов, закон распределения импульсов по частотам и др.). Ниже приведено решение задач измерения параметров радиоимпульсных сигналов при обнаружении с адаптивной коррекцией порога на фоне шумов при высокой скорости потока данных и приведены сравнительные характеристики эффективности для различной реализации алгоритмов обнаружения. Структурная схема комплекса обработки Схема комплекса обработки представлена на рис. 1. С выхода при╦мника сигнал поступает на входы АЦП обнаружения и обработки. После аналого-цифрового преобразования сигнал синхронно записывается во внутренний буфер как АЦП обнаружения, так и АЦП обработки. Обнаружение радиоимпульса во входном потоке данных происходит в модуле цифровой обработки сигналов TORNADO-P67 компании "МикроЛАБ Системс" (www.mlabsys.com) на базе цифрового сигнального процессора TMS320C6701. Модули ЦОС TORNADO представляют собой очень удобный "конструктор ЦОС". TORNADO-P67 включает в себя динамическую (SDRAM), синхронную блоковую (SBSRAM), двухпортовую (DPRAM) память, а также последовательный (SIOX) и параллельный (PIOX) интерфейс ввода/вывода. При обнаружении радиоимпульса переда╦тся целеуказание в аналогичный модуль DSP TORNADO-P67 посредством мультиканального последовательного буферизованного порта (McBSP), используя интерфейс SIOX. При получении целеуказания производится считывание данных (временных отсч╦тов) из буфера АЦП обработки посредством интерфейса PIOX (рис. 1). В DSP обработки проводится регистрация обнаруженного импульса (пачки импульсов) и оценка его параметров. Рисунок 1.Схема комплекса обработки
Вычислительные ресурсы процессора TMS320C6701 позволяют работать в реальном масштабе времени при скорости потока данных 80 Мбайт/с (частота дискретизации АЦП - 40 МГц, разрядность преобразования - 12, дополненная до 16). Проведенный анализ представленных алгоритмов решения поставленной задачи позволил экстраполировать предельную скорость потока данных до 290 Мбайт/с в случае замены процессора на TMS320C6416, даже если не учитывать дополнительные возможности архитектуры самого мощного на сегодняшней день представителя платформы С6000. Реализация алгоритмов обнаружения и оценок параметров радиоимпульсов Не ограничивая общности, в качестве модели используем сигнал с двоичной ЧМ, представляющий собой последовательность радиоимпульсов со случайной начальной фазой, частоты которых перестраиваются в диапазоне Ws. Модель такого сигнала во время j-го скачка частоты длительностью Th может быть представлена в виде: frgfgfgertgfgerfgerfrgfrgregrgergregregerg(1)где Ps - мощность сигнала; frgyryfrhgsrgfruhgfrhgrygfryfrghr(2) Будем считать, что сигнал (1) наблюдается на фоне аддитивного белого гауссовского шума n(t) с односторонней спектральной плотностью N0. В процессе реализации обработки наблюдаемых данных y(t) = s(t) + n(t) необходимо обнаружить факт появления импульса во входном потоке данных и оценить параметры принимаемого импульса (1), к которым относятся время регистрации t0, длительность При построении обнаружителя, учитывая априорную информацию о сигнале и ограниченные вычислительные возможности процессора, был остановлен выбор на схеме энергетического обнаружителя [4]. Огибающая сигнала z(t), согласно выбранной схеме, вычисляется как
где h(t√t') ≈ импульсная характеристика фильтра нижних частот (ФНЧ), входящего в состав обнаружителя. После фильтрации преобразованный сигнал z(t) попадает на адаптивное пороговое устройство, где происходит его сравнение с порогом z0 для принятия решения. При реализации цифровой схемы обнаружения в качестве фильтра нижних частот был выбран однородный фильтр с конечной импульсной характеристикой (КИХ). Полоса фильтра должна быть согласована с длиной импульса для того, чтобы максимально использовать энергию сигнала: fdjghgherhghrhgrhgureh(4) где n - порядок фильтра; y - оцифрованный входной сигнал после аналогового широкополосного фильтра; z - огибающая сигнала (3). Учитывая особенность архитектуры процессора TMS320C6000, а именно, наличие двух устройств загрузки из памяти, можно рационально обработать ситуацию одновременного вычисления двух отсч╦тов огибающей, что является стандартным методом оптимизации кода под выбранный процессор [5]: nuhgudfhbgvjktdnhbgvjt (5) Если учесть, что умножение с фиксированной точкой выполняется за два такта процессора, а сложение - за такт, то преобразуя в (5) разность квадратов, получим: gnhbjgjhbigjhbutgjhb (6) Для минимизации количества вычислительных операций более эффективным является использование приближенного вычисления скользящего среднего, определяемого выражением: jngbuithbgvjufhd (7) При алгоритме (7) вычисление огибающей z(t) требует одного умножения, двух сложений (сложение и вычитание) и одного битового сдвига (для n, равного степени двойки). Выражение (7) также можно преобразовать, учитывая наличие двух устройств загрузки из памяти в регистр, к виду gbnhgbhgjubhg (8) Дополнительные операции сравнения и записи в мультиканальный последовательный буферизованный порт привносятся на уровне порогового устройства. В таблице приведены сравнительные характеристики эффективности использования алгоритмов для двух процессоров семейства С6000. В предположении, что огибающая сигнала подчиняется обобщ╦нному рэлеевскому распределению [6], была рассчитана помехоустойчивость оптимального обнаружителя. Замеренные статистические характеристики показали, что при рабочих соотношениях сигнал/шум ~10√15 дБ проигрыш в помехоустойчивости реализованной схемы обнаружения по отношению к оптимальному обнаружителю не превышает 1 дБ при вероятности ложной тревоги 10-4. Важной частью реализованного обнаружителя является адаптивное пороговое устройство. Задача выбора порога и его адаптации к реальной радиообстановке является очень непростой и не имеющей однозначного решения, оптимально подходящего под все виды сигналов и инвариантного к априорной информации о сигнале. В качестве решения задачи выбора порога мы остановили свой выбор на критерии Неймана-Пирсона. В практическом применении он сводится к решению интегрального уравнения
где p0(z) - дифференциальная функция распределения огибающей шума, z0 - пороговое значение, e0 - вероятность ложной тревоги, типовые значения которых для такого уровня осведомленности о сигнале находятся в интервале 10-5-10-3 [7]. Статистическая оценка функции p(z) и численное решение интегрального уравнения (6) проводятся в ПЭВМ, что позволяет распараллелить процесс адаптации порога и функцию обнаружения. В DSP обработки после получения целеуказания от обнаружителя проводится оценка временных (t0 и При решении задачи оптимизации вычисления спектра для оценки частотных характеристик импульсов был рассмотрен ряд методов быстрого преобразования Фурье (БПФ). В результате провед╦нного отбора по критерию минимизации вычислительных затрат, используя процессор TMS320C6701, был остановлен выбор на реализации БПФ методом Кули-Тьюки по основанию 2. Заключение Реализована схема энергетического обнаружения радиоимпульсов при использовании эффективных алгоритмов на платформе DSP TMS320C6701 с передачей целеуказания на обнаруженный импульс в другой модуль DSP, где проводится оценка импульсных параметров. Особенностью реализации является высокая плотность инструкций на такт (6 из 8 возможных) в ядре конвейера, что да╦т среднюю производительность более 900 МFLOFS. Помехоустойчивость реализованной схемы обнаружения отличается от помехоустойчивости оптимального обнаружителя на 1 дБ в рабочем интервале соотношений сигнал/шум 10√15 дБ. Таблица. Сравнительные характеристики реализации альтернативных алгоритмов обнаружения
Литература
НПП ╚ПОИСК╩, ул. Текучева, 141, 344010, г. Ростов-на-Дону, Россия. E-mail: konst_z@mail.ru |
 (9)
(9)