|
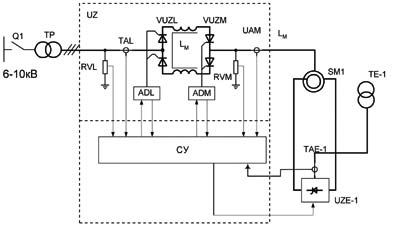
А. Блинов, А. Вейнгер, В. Максимов, А. Максимов, А. Новаковский, Л. Яковлев Система управления мощным высоковольтным электроприводом на базе процессоров ЦОС TMS320C3хМассовое распространение регулируемых приводов на базе силовых преобразователей частоты ≈ ПЧ (стандартные приводы для работы от сети с напряжением 220√380═В, 50√60═Гц и мощностью от сотен ватт до сотен киловатт различные фирмы выпускают сотнями тысяч штук в год) вызвало появление целого ряда специализированных микропроцессоров, ориентированных для работы в таких устройствах. Цифровая реализация системы управления регулируемого электропривода требует от вычислителя высокой производительности, вследствие чего большинство приводов ведущих западных фирм выполнено на процессорах цифровой обработки сигналов (ЦОС). Такие микропроцессоры выпускаются ведущими полупроводниковыми фирмами, например, TMS320C(F)240 фирмы Texas Instruments, ADMC200 фирмы Analog Devices и другие. Они имеют непосредственно на кристалле подсистему ввода аналоговых сигналов, достаточное число дискретных входов/выходов, таймеры, аппаратный широтно-импульсный модулятор (ШИМ) для преобразователя инвертора. Эти специализированные микропроцессоры обеспечивают вполне приемлемые характеристики ПЧ для массовых стандартных приводов с выходным напряжением 220√380√660═В, однако, что касается мощных высоковольтных приводов, реализующих более сложные алгоритмы "векторного" управления с моделью электродвигателя, возможности подобного рода кристаллов оказываются в большинстве случаев недостаточными. Введение Ниже представлены результаты разработки устройства управления на базе микропроцессорного контроллера Торнадо-Е31 высоковольтным синхронным приводом мощностью 20 МВт и напряжением 10 кВ на одно-операционных тиристорах, силовая часть которого выполнена фирмой Ансальдо-ВЭИ. При этом основное внимание уделено переводу программного обеспечения созданной ранее [1] двухпроцессорной системы цифрового управления (ЭВМ IBM PC плюс процессор ЦОС типа TMS320C30) на единую платформу контроллера ЦОС TORNADO-Е31/E33 с процессором ЦОС с плавающей запятой TMS320C31/C33, оптимизации структуры интерфейсных компонентов этого контроллера, а также отработке методики отладки программного обеспечения устройства управления в процессе его создания. Контроллер Как уже было отмечено выше, это не первый высоковольтный привод подобного рода, реализованный АО ВНИИЭ с использованием контроллеров TORNADO фирмы "МикроЛаб Системс" (www.mlabsys.com), которая специализируется на разработке различных встраиваемых и автономных вычислителей на базе процессоров ЦОС TMS320 и периферийных модулей к ним. Цифровая система управления приводом, описанная в [1], была реализована на базе платы TORNADO-30 с процессором ЦОС с плавающей точкой типа TMS320C30, рассчитанной на установку в ISA-слот PC-совместимого компьютера. В этой двухпроцессорной системе быстрые алгоритмы управления ПЧ исполняет процессор ЦОС на плате Торнадо-30, связанный через свои навесные модули ввода/вывода аналоговых и дискретных сигналов с силовым ПЧ. Все системные функции, включая человеко-машинный интерфейс, ввод/вывод "медленных" дискретных сигналов внешней автоматики привода выполняет процессор ЭВМ IBM PC, который для получения необходимого уровня над╦жности взят в промышленном исполнении. Такой подход дал возможность распараллелить программирование системы и позволил тем самым провести всю разработку, изготовление и отладку всей такой сложной системы - практически с нуля до полномасштабных испытаний на экспериментальном стенде с нагрузкой свыше 1000 кВт - менее, чем за полгода. Вс╦ это позволило проверить алгоритмы управления, уточнить необходимые частоты выборок сигналов обратной связи и выдачи сигналов управления открытием тиристоров, допустимые значения циклов вычислений "быстрых" и "медленных" переменных, другие аппаратные и программные решения. Однако очевидно, что использованная архитектура - ЭВМ IBM═PC с встраиваемым DSP-контроллером - не является оптимальной из-за большого объ╦ма оборудования. Цифровая система управления приводом на базе двух различных вычислительных платформ усложняет сопровождение и модернизацию программного обеспечения, так как требует одновременного использования разных компиляторов. Кроме того, приведение всего программного обеспечения к одной платформе на одном языке программирования высокого уровня с одновременным исключением ассемблерных вставок (в новой версии программы на языке Си на ассемблере написаны только строки инициализации векторов прерывания) позволило сделать программное обеспечение приспособленным к переносу на ту или иную процессорную платформу, например, в силу технико-экономических соображений. Для системы управления мощным высоковольтным электроприводом была применена специализированная интерфейсная плата, устанавливаемая как навесной модуль к разъ╦му параллельного интерфейса PIOX-16 контроллера TORNADO-E31/E33. Состав платы ориентирован для работы со структурными схемами мощных ПЧ на базе обычных и запираемых силовых тиристоров в выпрямителе и инверторе, наиболее часто используемыми в настоящее время. В качестве базовой была выбрана схема ПЧ с 6-пульсным управляемым выпрямителем и 6-пульсным инвертором тока, показанная на рис. 1. При работе со схемами ПЧ с 12-пульсным выпрямителем и/или 12-пульсным инвертором, две платы сопряжения включаются в параллель для работы через один параллельный интерфейс PIOX платы TORNADO-E31/E33. При использовании тр╦х плат сопряжения можно обеспечить управление ПЧ с 18-пульсным выпрямителем. Рисунок 1. Структурная схема синхронного электропривода
На рис. 1 применительно к ПЧ с 6-пульсным управляемым выпрямителем и 6-пульсным инвертором на одно-операционных тиристорах показаны основные связи контроллера устройства управления СУ с силовой частью UZ. При этом устройство управления СУ использует для своей работы следующие аналоговые сигналы обратной связи:
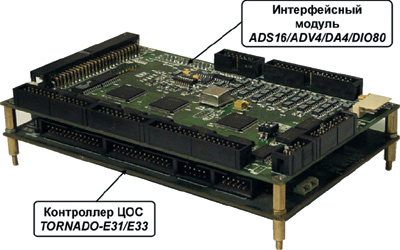
Устройство управления СУ выда╦т логические сигналы открытия силовых приборов выпрямителя и инвертора, которые с помощью усилителей-драйверов ADL - для выпрямителя и ADM - для инвертора формируют импульсы управления тиристорами. Эти же драйверы выдают в контроллер логические сигналы о состоянии драйверов и/или тиристоров. Для указанного силового преобразователя число дискретных сигналов управления и диагностики равно 12x2 = 24. Кроме упомянутых выше так называемых "быстрых" аналоговых сигналов обратной связи из ПЧ - время выборки всех 12 сигналов не должно превышать нескольких микросекунд, используются и "медленные" аналоговые входы: задания частоты и измерения регулируемого параметра (например, давления), а также аналоговые выходы: для управления возбудителем, выдачи на стрелочные приборы значений фактической частоты вращения двигателя и ещ╦ 2√3 выхода - для отладочных целей, для которых достаточно времени преобразования порядка 1 мс, однако для этих сигналов требуется гальваническое разделение цепей сигнала и контроллера. Кроме того, для сопряжения с устройствами внешней автоматики электропривода необходимо ещ╦ несколько дискретных входов управления, внешних защит и блокировок, а также сигнальных выходов - всего около 16√24 дискретных входов/выходов (зависит от конкретного назначения и особенностей технологии регулируемого электропривода). Все эти соображения и легли в основу архитектуры и параметров интерфейсного модуля АDSI6/ADV4/DA4/DIO80 и модулей нормализации сигналов контроллера TORNADO-E31/E33. Интерфейсный модуль АDSI6/ADV4/DA4/DIO80 Интерфейсный модуль АDSI6/ADV4/DA4/DIO80 включает в себя следующие функциональные узлы: 16-канальный 12-разрядный АЦП с одновременной выборкой сигналов во всех каналах; 4-канальный 12-разрядный АЦП с мультиплексированием входов; 4 12-разрядных ЦАП с переключаемой шкалой выходного напряжения; буферные схемы дискретных входов и выходов; 3 16-разрядных таймера; сторожевой таймер. 16-канальный АЦП выполнен на основе 16 одноканальных АЦП типа AD7895 со временем преобразования 3,8═мкс, со встроенной схемой выборки/хранения, шкалой ±10 В, скоростным сериальным интерфейсом для передачи данных. Интерфейсный модуль АDSI6/ADV4/DA4/DIO80, установленный на контроллер ЦОС TORNADO-E31/E33, показан на рис. 2. Рисунок 2. Контроллер ЦОС TORNADO-E31/E33 с интерфейсным модулем АDSI6/ADV4/DA4/DIO80
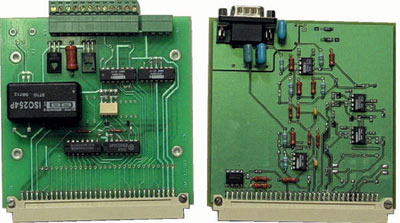
Платы нормализации сигналов Разработанная интерфейсная плата ввода/вывода АDSI6/ADV4/DA4/DIO80 предназначена для работы с аналоговыми сигналами ±10═В и логическими сигналами TTL-уровня без гальванического разделения цепей сигналов. Поэтому в состав устройства управления входят также ряд отдельных плат, предназначенных для нормирования (согласования вида, уровня, гальванического разделения и т.п.) входных и выходных сигналов при сопряжении с силовой частью и другими элементами электропривода. Эти модули рассчитаны на установку в стандартные еврокассеты с форм-фактором 3U и учитывают специфические особенности работы ПЧ. В состав типового комплекта модулей нормализации входят:
Отказ от переноса большинства функций этих модулей в интерфейсную плату сопряжения объясняется тем, что при этом легче обеспечить помехоустойчивость устройства управления за сч╦т разнесения цепей высоковольтных и сильноточных цепей, меньшие требования к габаритам используемых в этих схемах элементов, например, прецизионных конденсаторов. В этом случае упрощается подвод проводов к блокам зажимов - клеммникам модулей согласования сигналов. Прецизионные конденсаторы в модулях нормализации сигналов по току и напряжению выпрямителя и инвертора в интеграторах обеспечивают при измерении постоянство соотношения сигнал√шум в процессе разгона двигателя из неподвижного состояния до номинальной скорости, когда измеряемое напряжение на выходе инвертора изменяется в диапазоне 1000:1. На рис.═3 показан вид комплекта модулей согласования. При этом оба модуля нормализации токов и напряжений (внизу справа) показаны со снятыми конденсаторами, так как при проверке устройства управления совместно с компьютерной моделью (см. ниже) интегрирование выполняется в модели программным пут╦м из-за невозможности обеспечения необходимого динамического диапазона изменения напряжения на выходе модели инвертора при разгоне двигателя. Рисунок 3. Общий вид комплекта модулей нормализации сигналов
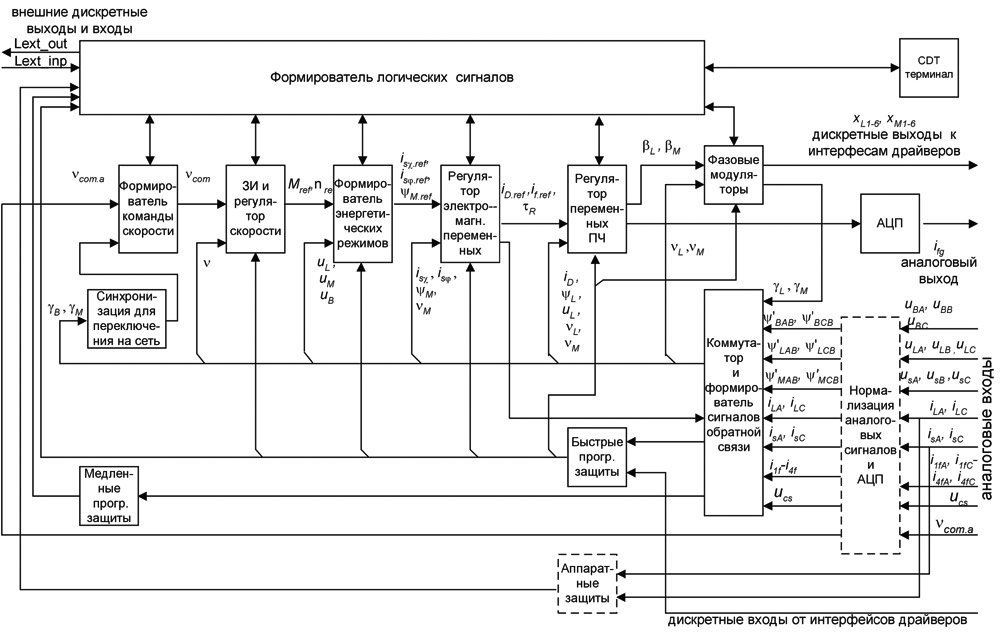
Терминал оператора Человеко-машинный интерфейс выполнен с помощью терминала с алфавитно-цифровым дисплеем (4 строки по 20 символов) и функциональной клавиатуры (16 клавиш) на базе специализированного терминала DK-8072. Через этот терминал обеспечивается ввод параметров настройки, измерение режимных параметров работы регулируемого привода в процессе работы, задание рабочих и тестовых режимов, считывание аварийных и диагностических сообщений. Сопряжение терминала с контроллером выполнено через один из последовательных портов контроллера TORNADO-E31/E33, запрограммированного как стандартный COM-порт RS232. Особенности алгоритмов управления синхронным приводом Силовая цепь электропривода на рис. 1 представляет собой зависимый инвертор тока и состоит из двух одинаковых тр╦хфазных мостовых управляемых тиристорных выпрямителей, включенных своими шинами постоянного тока встречно-параллельно через сглаживающий реактор. Тр╦хфазный вход первого (собственно выпрямителя) через трансформатор подключен к питающей сети, а второго (инвертора) - к статорной обмотке двигателя. В качестве сигналов обратной связи системы управления измеряются фазные напряжения и токи на входе выпрямителя и выходе инвертора, а также на входе возбудителя и напряжение на рабочих шинах. Структурная схема алгоритма управления регулируемым электроприводом, привед╦нная на рис. 4, выполнена по принципу многоконтурной подчин╦нной, с настройкой каждого контура на модульный оптимум. Для формирования обратных связей по скорости и угловому положению ротора, а также потокосцеплению двигателя используется оригинальный алгоритм, отдельные элементы которого применены и для синхронизации систем импульсно-фазового управления (СИФУ) выпрямителя и возбудителя, а также измерения углового положения вектора напряжения сети электроснабжения. Так как тиристоры - приборы с неполной управляемостью, то коммутация вентилей инвертора осуществляется за сч╦т реактивной мощности двигателя, что накладывает строгие ограничения на его электромагнитный режим и обуславливает специфическую структуру регулятора внутреннего контура. Для компенсации неидеальности характеристики выпрямителя в зоне прерывистых токов применена дополнительная быстродействующая обратная связь по выпрямленному току. СИФУ построена по вертикальному принципу, то есть основана на сравнении пилообразного опорного сигнала с уставками. Рисунок 4. Функциональная схема алгоритма устройства управления синхронным электроприводом
Особенностями алгоритмов управления, повлиявшими на выбор аппаратных средств и структуру программного обеспечения, были:
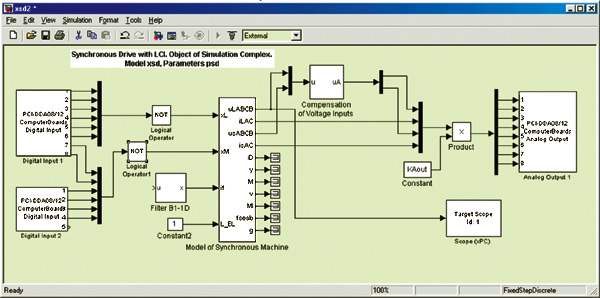
Чтобы удовлетворить привед╦нным выше достаточно противоречивым требованиям, особенно требованиям по быстродействию, был использован процессор ЦОС с плавающей запятой, обеспечивающий выполнение всех вычислительных операций за один такт. Разработка программного обеспечения выполнялась с помощью компилятора языка Cи с библиотеками, ассемблера, компоновщика, внутрисхемного эмулятора с отладчиком для настольного компьютера и других утилит разработки фирм TI и "МикроЛаб Системc" [3]. Программная реализация алгоритма Программная часть системы управления представляет собой набор процедур, различные циклы запуска, приоритеты и времена сч╦та. Существуют следующие циклы запуска (расположенные в порядке убывания приоритета): 25 и 100 мкс, 1 и 5 мс, фоновая задача. Процедуры с циклами 25 мкс и 1 мс запускаются независимо, каждая от своего таймера. По сигналам 25-мкс таймера запускается процедура вывода импульсов управления тиристорами, а также через аппаратный делитель частоты с коэффициентом 8 запускается 16-канальный АЦП на интерфейсной плате ввода/вывода. По окончании преобразовании всех 16 каналов запускается контроллер DMA микропроцессора, и результаты преобразования переписываются из регистра FIFO платы ввода/вывода в оперативную память контроллера TORNADO-E31/E33. По окончании этой операции прерывание от контроллера DMA запускает основной 200-мкс цикл вычислений. Внутри этого цикла организованы два программных сч╦тчика - для выполнения один раз в одну и пять мс достаточно коротких вычислений, заканчивающихся в пределах того же 200-мкс цикла. Такие длительные циклы, запускаемые внутри короткого цикла, не удалось методами языка Си выделить в отдельные прерываемые задачи со своими заданными приоритетами. Поэтому ещ╦ одна процедура с циклом 1 мс, но со временем вычислений большим 200 мкс, запускается от другого таймера. Эта процедура имеет более низкий приоритет, чем 25-мкс вычисления, но выше всех остальных. В программе имеются ещ╦ две задачи с самым низким приоритетом. Первая задача ≈ обмен данными с терминалом по каналу RS232, она организована как фоновая. Вторая задача - вывода аналоговых сигналов через ЦАП интерфейсного модуля на внешние стрелочные приборы и/или на экран осциллографа при проведении наладочных работ. При периоде вывода аналоговых сигналов в 1 мс требования к привязке их ко времени сравнительно невысокие. Эту задачу удалось организовать следующим образом: она запускается по программному сч╦тчику внутри 200-мкс цикла каждую мс, но становится фоновой после запуска, то есть может быть прервана другой задачей с более высоким приоритетом. Процессор TMS320C3x аппаратно поддерживает команды вычисления с плавающей запятой: сложение, умножение и вычитание, которые выполняются за один такт. В то же время, исполняемые алгоритмы управления требуют вычисления обратных величин, квадратных и тригонометрических функций, кривых намагничивания электрической машины. Поэтому для экономии времени цикла вместо вычислений с помощью библиотечных подпрограмм используются соответствующие таблицы, которые генерируются на этапе инициализации программы и загружаются в память типа SRAM контроллера TORNADO. Методика отладки устройства управления Этап отладки алгоритмов и разработанного программного обеспечения - один из самых сложных в ходе создания устройства управления такой сложной технической системы, как частотно-регулируемый привод. Особенно это относится к мощным высоковольтным приводам, когда любая ошибка в алгоритме и/или программном обеспечении контроллера может привести к аварии с тяж╦лыми последствиями, не говоря уже о стоимости ремонта вышедшего из строя оборудования. Использование для отладки физической модели объекта управления также весьма затруднительно, и, кроме того, последняя не всегда да╦т правильные результаты из-за несоблюдения коэффициентов подобия. Поэтому в данной работе в качестве модели объекта управления была использована компьютерная модель, работающая в реальном масштабе в среде моделирования МатЛаб-Симулинк на ЭВМ типа IBM PC, и связанная через плату ввода/вывода типа PCI-DDA08/12 (8 12-разрядных ЦАП и 48 дискретных входов/выходов) с отлаживаемым контроллером. Так, контроллер получает сигналы обратной связи о токах и напряжениях выпрямителя и инвертора привода, а компьютерная модель силового ПЧ, в свою очередь, получает импульсы управления тиристорами. Для модели электропривода задаются необходимые длительности циклов вычислений для отдельных подсистем модели, программно коммутируются входы и выходы платы PCI-DDA08/12. За сч╦т замены типовых драйверов управления PCI-DDA08/12 на оригинальные удалось почти в 1,5√2 раза уменьшить затраты времени на обмен информации между ЭВМ и контроллером: частота обмена сигналов между моделью и контроллером составила 33,33 кГц. Сравнение результатов на модели, полученных с помощью этой модели, с расч╦тами и результатами экспериментов подтвердили правомерность использования такой технологии для всех штатных и, самое главное, и нештатных режимов работы привода (при этом не учитывались только электромагнитные процессы в снаббер-цепях тиристоров). На рис. 5 показан экран с моделью синхронного электропривода (синхронная электрическая машина вместе с силовой частью ПЧ и питающей сетью), работающей в реальном масштабе времени, и входами/выходами платы PCI-DDA08/12 для связи с TORNADO-E31/E33. Разными цветами выделены медленные и быстрые циклы вычислений модели. Рисунок 5. Экран модели синхронного электропривода с элементами сопряжения с контроллером Торнадо в среде МатЛаб-Симулинк
Литература
|