|
Н. Атаманов, М. Глазков, И. Гусев, В. Каминский Использование сигнальных процессоров семейства TMS320 в гироскопической системе измерения угловых параметров железнодорожного путиДля поддержания необходимого уровня безопасности движения на железнодорожном транспорте периодически проводится комплекс мероприятий, одной из составляющих которого является определение и регистрация параметров, характеризующих состояние рельсовой колеи. Эти работы проводятся с помощью оборудования, установленного на вагоне-путеизмерителе. Одной из задач, решаемых с помощью этого оборудования, является определение углов наклона вагона-путеизмерителя относительно колесной пары в продольном и поперечном направлениях, а также измерение курсового угла вагона в процессе движения. В совокупности с информацией от других датчиков, угловая информация позволяет производить расчет необходимых геометрических параметров рельсовой колеи. Современные требования точности оценки геометрических параметров колеи находятся в пределах 1┘3 мм, что в свою очередь ограничивает допустимую погрешность угловых измерений величиной (1,7√2,8)·10-2 град. Реализация подобных требований к точности угловых измерений в процессе движения в условиях ж╦сткого реального времени представляет собой достаточно сложную в техническом плане задачу, требующую, как будет показано ниже, значительных вычислительных мощностей. В целом упомянутая задача является типичной задачей цифровой обработки сигнальной информации, поступающей от гироскопических датчиков и акселерометров. Она состоит из нескольких блоков (этапов):
Наибольший удельный вес в вычислениях приходится на долю навигационной задачи, что связано с массированным использованием при е╦ решении матричных операций. Задача измерения углов отклонения от плоскости горизонта в продольном и поперечном направлениях (тангаж v и крен С развитием лазерной гироскопии и средств вычислительной техники в 70√80-х годах прошлого века появилась возможность отказаться от ГСП и датчиков углов при создании систем подобного назначения. Эти системы получили название бесплатформенных инерциальных систем, либо бесплатформенных курсовертикалей, в зависимости от объ╦ма вычисляемых параметров. В этих системах функция ГСП по реализации опорной системы координат и определении углов Эйлера выполняется в вычислителе при решении уравнений Пуассона для определения параметров ориентации (элементов матрицы А): где Переходя непосредственно к рассмотрению структуры системы, отметим, что для измерения пространственной ориентации движущихся объектов возможно использование гироскопических систем двух типов:
Для определения углов крена и тангажа точность курсовертикали с "маятниковой" коррекцией обычно лежит в пределах 0,3┘0,5 град., так как зависит от динамики движения объекта. Погрешности инерциальной курсовертикали не зависят от движения объекта и определяются собственной точностью гироскопов и акселерометров, на базе которых строится система. Кроме того, в инерциальной курсовертикали имеется возможность определения начального курса системы (направления движения). Для данной задачи наиболее целесообразным представляется решение в виде бесплатформенной инерциальной курсовертикали, интегрированной с при╦мником сигналов спутниковой навигационной системы GPS-ГЛОНАСС и измерителем пройденного пути (одометром). Дело в том, что ошибки определения углов крена и тангажа зависят от величины собственного дрейфа гироскопов, а предлагаемая структура позволяет использовать лазерные гироскопы средней точности с дрейфом не хуже 0,05 град./час и решить проблему точного измерения углов за сч╦т периодической коррекции ошибок инерциальной курсовертикали по сигналам СНС и одометра. Инерциальная курсовертикаль (система) должна иметь в данной задаче два режима работы:
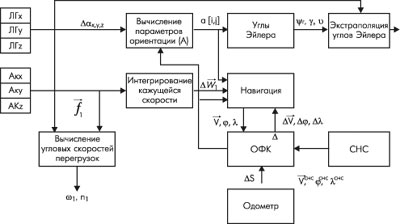
Для реализации вышеперечисленных функций в состав системы входят в качестве чувствительных элементов три акселерометра типа АЛ-1 и три лазерных гироскопа (ЛГ) типа КМ-11-1. Структурная схема системы в виде набора функциональных алгоритмов представлена на рис. 1. Рисунок 1. Структурная схема системы
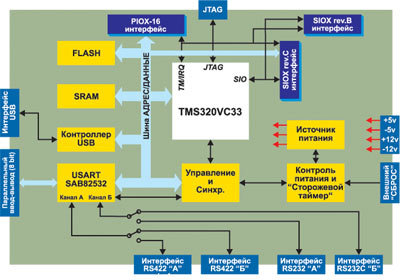
Основные выходные параметры системы - углы Эйлера вычисляются через элементы a[i,j] матрицы А перехода от связанной системы координат к опорной системе координат. Для вычисления матрицы А используется информация от тр╦х ЛГ, представляющая собой приращения углов поворота связанной системы координат в абсолютном пространстве С точки зрения вычислительных погрешностей, для реализации большинства алгоритмов, за исключением алгоритма вычисления матрицы А, достаточно иметь 32-разрядный процессор с плавающей точкой. В то же время, эксперименты показали, что для обеспечения необходимой точности вычисления матрицы А ряд операций в этом алгоритме надо выполнять с удвоенной разрядностью. Реализация системыДля реализации вышеописанных алгоритмов Навигационной системы использован встраиваемый вычислитель "TORNADO-E33" в индустриальном исполнении (диапазон рабочих температур -40...+85ºС) производства фирмы "MicroLAB Systems" (www.mlabsys.com). Структура вычислителя TORNADO-E33 (рис. 2) реализована на базе 32-разрядного цифрового сигнального процессора TMS320VC33 (DSP) фирмы Texas Instruments, который обладает производительностью 150 MFLOPS и содержит на кристалле внутреннюю оперативную память ╦мкостью 34Кx32. На плате TORNADO-E33 имеются микросхемы статического ОЗУ (SRAM) ╦мкостью до 512Кx32 и FLASH-памяти ╦мкостью до 512Кx8. На плате имеется двухканальный универсальный синхронно/асинхронный при╦мопередатчик (10 Mбит/с) USART (SAB 82532) с двумя двухканальными интерфейсами RS422 I/F (10 Mбит/с) и RS232 (115 Kбит/с), а также USB-контроллер, для подключения по шине USB управляющего компьютера. Для установки дочерних модулей ввода/вывода аналоговых и цифровых сигналов на плате TORMADO-E33 имеются разъ╦мы параллельного (PIOX-16) и последовательного SIOX интерфейсов расширения ввода/вывода. Параллельный интерфейс расширения (PIOX-16) содержит сигналы адреса/данных (A/D) процессора, сигналы таймера (TM) и прерываний (IRQ), а также напряжения питания и используется для стыковки "TORNADО" с датчиковым оборудованием навигационной системы (рис. 2). Рисунок 2. Структура вычислителя TORNADO-E33
Разработка и отладка штатного алгоритма и моделей производилась в системе проектирования "Code Composer 4.10", обновл╦нной до Service Pack 2 с использованием скан-эмулятора "MIRAGE-P510" производства той же "MicroLAB Systems". Головной алгоритм навигационной системы, решающий задачу ориентации навигации и коррекции, ж╦стко привязан к моментам съ╦ма информации с гироскопов и акселерометров. Его работа инициируется по прерываниям от периферийного оборудования и не может быть прервана другими потоками и задачами. Алгоритм занимает 7√10% времени такта съ╦ма информации. В "фоне" решаются задачи при╦ма информации от спутниковой навигационной системы, задача встроенного контроля процессора и устройств памяти вычислителя, задача проверки корректности исполнения алгоритма и интерактивного взаимодействия с оператором (если подключен технологический канал RS-232). Для производства коррекции вертикали и списания дрейфов датчиков в алгоритм вводится корректирующая информация от спутниковой навигационной системы фирмы Trimble (протокол обмена информацией NMEA). Информация от спутниковой системы принимается и оценивается в "фоне" и переда╦тся в головной алгоритм. Контроль ЦПУ вычислителя производится по алгоритмам, рекомендованным Texas Instruments для своих процессоров. Контроль целостности кода программы производится периодическим расч╦том контрольной суммы области памяти, содержащей программу и данные. Контроль ОЗУ осуществляется разрушающим методом с последующим восстановлением. Корректность исполнения алгоритма осуществляется посредством сбора и обработки статистической информации о ходе исполнения программы: сбор информации о вычислительной нагрузке, создаваемой частными алгоритмами, проход контрольных точек алгоритма и т.п. В процессе эксплуатации взаимодействие оператора с системой не требуется, однако в программе предусмотрен несложный командный процессор, взаимодействующий с оператором через технологический канал RS-232 и позволяющий посредством директив выдать статистические данные о работе системы и изменить некоторые е╦ параметры. Для обеспечения равномерности и независимости работы алгоритмов, работающих в "фоне", используется ядро реального времени "Nucleus RTX". Выбор пал на ядро Nucleus по причине его крайней простоты, удобства, высокой степени отработанности и минимума усилий по адаптации к конкретной системе. Специфика головного алгоритма не требует интенсивных оптимизированных вычислений, однако реализация численных методов, использованных в алгоритме, требует их повышенной точности. Поэтому они реализованы в виде программных библиотек, содержащих арифметические операции двойной (64 бит) разрядности. Совокупность всех требований к системе, а также рыночная конъюнктура сигнальных процессоров, качество средств проектирования и развитая инфраструктура написания программного обеспечения для процессоров Texas Instruments предопределили выбор центрального процессорного устройства и марки встроенного вычислителя. Стык вычислителя "TORNADO-E33" с периферийным оборудованием системы производится через параллельный интерфейс PIOX-16. Для обеспечения обмена информацией между вычислителем, датчиками и периферийными устройствами используется устройство ввода/вывода (УВВ), которое решает следующие основные задачи:
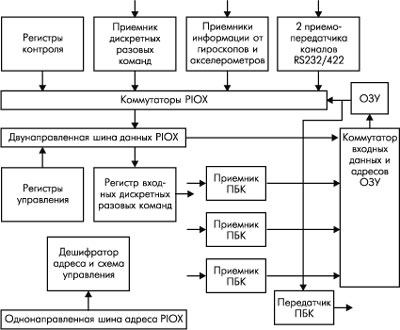
Ядро устройства реализовано на ПЛИС EPF10K30AQC208-3 фирмы ALTERA. При проектировании использовалось стандартное ПО САПР МАХ+plusII 10.0 и стандартный язык описания схем VHDL. Обобщ╦нная структурная схема, реализованная с помощью ПЛИС, приведена на рис. 3. Рисунок 3. Реализация структуры системы на ПЛИС
Общая логика функционирования УВВ была выстроена таким образом, чтобы минимизировать затраты времени центрального процессора (TMS) при вводе/выводе информации. Для этого периодический (с периодом 160 Гц) ввод информации от акселерометров и гироскопов (6 каналов в совокупности) осуществляется аппаратно, и введ╦нная информация помещается в ячейки ОЗУ по адресам, индивидуальным для каждого датчика. Таким образом, происходит прямое отображение текущего состояния всех датчиков в ячейки оперативной памяти процессора. После завершения очередного цикла опроса всех датчиков генерируется 30-нс импульс аппаратного прерывания для процессора, что может быть использовано при необходимости для индикации факта обновления информации от датчиков. При необходимости получения информации от какого-либо датчика процессор просто читает ячейку ОЗУ с известным адресом, не занимаясь обычным в таких случаях анализом готовности информации от датчика. Аналогично происходит процесс обмена информацией с внешними по отношению к гироскопической системе устройствами по каналам последовательного биполярного кода. В соответствии со стандартом ARINC429, обмен осуществляется 32-разрядными словами со скоростью 100 или 12 Кбит/с. При этом передаваемое или принимаемое слово логически подразделяется на младшие 8 бит (иногда называемые адресом), используемые для идентификации типа информации (крен, курс, тангаж и т.п.) и старшие 24 бита, используемые для передачи значения того или иного параметра. Обычно при передаче или при╦ме информации 32-разрядные слова записываются или читаются по адресам ОЗУ, равным по значению содержимому младших 8 разрядов посылки (см. выше). Массив информации, подлежащий выдаче потребителю последовательным биполярным кодом, предварительно записывается в ОЗУ и может корректироваться в процессе передачи. При этом вычислитель имеет возможность произвольного доступа к ОЗУ, а передатчик производит выборку передаваемых слов в соответствии с заданной на этапе программирования ПЛИС последовательностью передаваемых адресов. Принятая при╦мниками ПБК информация также записывается в ОЗУ, прич╦м, в соответствии с вышеуказанным ГОСТ 18977-79, адреса записи однозначно определяются содержимым младшего байта принятой посылки. Для разделения массивов информации содержимое младших байтов подвергается перекодировке. Таблица перекодировки зада╦тся на этапе программирования ПЛИС. Вычислитель может производить чтение информации в режиме произвольного доступа. Для согласования входных/выходных логических уровней сигналов ПЛИС и двухполярных уровней сигналов ±10 В, принятых в стандарте ARINC, используются микросхемы фирмы HOLT. Для доступа к относительно медленным периферийным устройствам, таким как регистры входных/выходных разовых команд, а также к регистрам контроля и управления используется метод простого программного регистрового чтения/записи (без автоматического отображения в ячейки памяти). Для управления УВВ вычислитель на шине адреса выставляет адрес соответствующего регистра, а на шине данных - управляющее слово и производит запись в регистр. Для контроля состояния УВВ на шине адреса выставляется адрес регистра контроля и производится чтение информации с шины данных. Подключение выходной информации УВВ к шине данных PIOX производится через коммутатор PIOX. Выбором подключения управляет дешифратор адреса. Описанная гироскопическая система для измерения угловых параметров железнодорожного пути применяется в модернизированных путеобследовательских станциях системы ЦНИИ-4 МД МПС РФ. Авторы благодарят сотрудников "MicroLAB Systems" за деятельное участие в подготовке статьи. |
|
|
 |
 |
PDFs | Новости | Литература | Схемы | Форум | Блоги | Реклама |
Чипинфо
 Использование сигнальных процессоров семейства TMS320. Гироскопическая система измерения угловых параметров железнодорожного пути. Оценка геометрических параметров колеи. Лазерная гироскопия. Бесплатформенная инерциальная система. Бесплатформенная курсовертикаль. Угол крена. Угол тангажа. Инерциальная курсовертикаль. Встраиваемый вычислитель TORNADO-E33. Контроль ЦПУ вычислителя. Путеобследовательская станция системы ЦНИИ-4 МД МПС РФ. Вагон-путеизмеритель.
Использование сигнальных процессоров семейства TMS320. Гироскопическая система измерения угловых параметров железнодорожного пути. Оценка геометрических параметров колеи. Лазерная гироскопия. Бесплатформенная инерциальная система. Бесплатформенная курсовертикаль. Угол крена. Угол тангажа. Инерциальная курсовертикаль. Встраиваемый вычислитель TORNADO-E33. Контроль ЦПУ вычислителя. Путеобследовательская станция системы ЦНИИ-4 МД МПС РФ. Вагон-путеизмеритель.