Разработка высококачественных устройств управления электроприводом на базе DSP Piccolo
![]()
Электропривод применяется повсеместно, начиная с офисной и бытовой техники, электроинструмента и заканчивая медицинским оборудованием, робототехникой и промышленным технологическим оборудованием. Особенно высокую концентрацию разнообразных электроприводов можно встретить в автомобильном транспорте, где они могут выполнять роли основного привода или исполнительных механизмов систем безопасности (стеклоочистители, антиблокировочная тормозная система) и обеспечения комфорта (стеклоподъемники; управление климатом, люком, дверным замком и положением сидений; электроусилитель рулевого управления и др.). Основой электропривода, предназначенной для преобразования электрической энергии в механическую, является электродвигатель (ЭД). Существует множество типов ЭД переменного и постоянного тока, а также универсальных. Многие из них достаточно просты в регулировании и требуют для этого либо формирования широтно-импульсно-модулированного напряжения питания (для двигателя постоянного тока коллекторного типа), либо коммутации обмоток в определенной последовательности (для шагового двигателя). Решение таких задач управления можно достичь даже использованием простых 8-битных микроконтроллеров (МК). Однако, ввиду высокой надежности и эффективности, наибольшее применение находят асинхронные двигатели (АД) и вентильные двигатели (ВД; известны также как синхронные двигатели на постоянных магнитах или PMSM, а также как бесколлекторные двигатели постоянного тока или BLDC). Однако создание на основе таких ЭД высококачественных регулируемых электроприводов связано с реализацией сложных алгоритмов цифрового управления в масштабе реального времени и вводом/выводом сигналов со сравнительно высокими точностью и быстродействием. Задача также может усложняться необходимостью реализации сопутствующих функций защиты, сигнализации, передачи данных, а также управления несколькими ЭД и вспомогательными силовыми каскадами. Более того, в условиях жесткой конкуренции все эти функции необходимо реализовать за минимальную цену. Успешность решения всех этих задач главным образом зависит от контроллера, который должен быть оснащен необходимым набором аппаратных ресурсов, обладать адекватной вычислительной способностью, точностью и быстродействием. Кроме того, немаловажным является доступность всесторонней технической поддержки со стороны производителя. Всем этим требованиям отвечают микроконтроллеры Piccolo компании Texas Instruments.
Ассортимент МК Piccolo разделен на две серии (см. таблицу 1): TMS320F2802x и TMS320F2803x. МК TMS320F2802x демонстрируют базовый уровень интеграции аппаратных ресурсов и доступны в 38- и 48-выводных корпусах. Внутри серии МК различаются объемом памяти, степенью интеграции некоторых УВВ и быстродействием АЦП. Все микроконтроллеры этой серии рассчитаны на работу в пределах расширенного температурного диапазона (-40...105°С), но некоторые из них (48-выводные F2822/3/6/7) также доступны в исполнении для работы в автомобильном температурном диапазоне -40...125°С. МК серии TMS320F2803x - новая разработка TI, на данный момент имеющая статус «для предварительного ознакомления». Эти изделия будут выпускаться в корпусах большего типоразмера и иметь более высокую степень интеграции, в том числе вычислительных и коммуникационных блоков.
Таблица 1. Микроконтроллеры Piccolo| Наименование | Процессор | Память | Модули управления | Коммуникационные модули | Напр. пи-та-ния, В | Ли-ний в/в | Встро-енный гене-ратор/ стаби-лизатор | Корпус | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Час-тота, МГц | CLA | ОЗУ, кбайт | Flash-па-мять, кбайт | Boot ROM | Кана-лов ePWM | Кана-лов HR PWM | Моду-лей eQEP | Вхо-дов eCAP | 32-битн. тай-меры ЦПУ | Кол-во каналов 12-битного АЦП/время преобраз., нс | Ком-па-ра-то-ры | I2C | UART/ SCI | SPI | LIN | CAN | |||||
| Серия TMS320F2802x | |||||||||||||||||||||
| TMS320F28020 | 40 | — | 6 | 32 | + | 8 | — | 0 | 1 | 3 | 7/500 13/500 | 1 2 | 1 | 1 | 1 | — | — | 3,3 | 20 22 | +/+ | 38-TSSOP 48-LQFP |
| TMS320F28021 | 40 | — | 10 | 64 | + | 8 | — | 0 | 1 | 3 | 7/500 13/500 | 1 2 | 1 | 1 | 1 | — | — | 3,3 | 20 22 | +/+ | 38-TSSOP 48-LQFP |
| TMS320F28022 | 40 | — | 12 | 32 | + | 8 | 4 | 0 | 1 | 3 | 7/325 13/325 | 1 2 | 1 | 1 | 1 | — | — | 3,3 | 20 22 | +/+ | 38-TSSOP 48-LQFP |
| TMS320F28023 | 40 | — | 12 | 64 | + | 8 | 4 | 0 | 1 | 3 | 7/325 13/325 | 1 2 | 1 | 1 | 1 | — | — | 3,3 | 20 22 | +/+ | 38-TSSOP 48-LQFP |
| TMS320F28026 | 60 | — | 12 | 32 | + | 8 | 4 | 0 | 1 | 3 | 7/217 13/217 | 1 2 | 1 | 1 | 1 | — | — | 3,3 | 20 22 | +/+ | 38-TSSOP 48-LQFP |
| TMS320F28027 | 60 | — | 12 | 64 | + | 8 | 4 | 0 | 1 | 3 | 7/217 13/217 | 1 2 | 1 | 1 | 1 | — | — | 3,3 | 20 22 | +/+ | 38-TSSOP 48-LQFP |
| Серия TMS320F2803x | |||||||||||||||||||||
| TMS320F28030 | 60 | — | 12 | 32 | + | 12 14 | — | 1 | 1 | 3 | 14/500 16/500 | 3 | 1 | 1 | 1 2 | 1 | 1 | 3,3 | 33 45 | +/+ | 64-TQFP 80-LQFP |
| TMS320F28031 | 60 | — | 16 | 64 | + | 12 14 | — | 1 | 1 | 3 | 14/500 16/500 | 3 | 1 | 1 | 1 2 | 1 | 1 | 3,3 | 33 45 | +/+ | 64-TQFP 80-LQFP |
| TMS320F28032 | 60 | — | 20 | 64 | + | 12 14 | 6 7 | 1 | 1 | 3 | 14/217 16/217 | 3 | 1 | 1 | 1 2 | 1 | 1 | 3,3 | 33 45 | +/+ | 64-TQFP 80-LQFP |
| TMS320F28033 | 60 | + | 20 | 64 | + | 12 14 | 6 7 | 1 | 1 | 3 | 14/217 16/217 | 3 | 1 | 1 | 1 2 | 1 | 1 | 3,3 | 33 45 | +/+ | 64-TQFP 80-LQFP |
| TMS320F28034 | 60 | — | 20 | 128 | + | 12 14 | 6 7 | 1 | 1 | 3 | 14/217 16/217 | 3 | 1 | 1 | 1 2 | 1 | 1 | 3,3 | 33 45 | +/+ | 64-TQFP 80-LQFP |
| TMS320F28035 | 60 | + | 20 | 128 | + | 12 14 | 6 7 | 1 | 1 | 3 | 14/217 16/217 | 3 | 1 | 1 | 1 2 | 1 | 1 | 3,3 | 33 45 | +/+ | 64-TQFP 80-LQFP |
Архитектура МК PiccoloTM специально оптимизирована под задачи цифрового управления и для этих целей оснащена специальными модулями, предназначенными для высокобыстродействующей обработки сигналов (см. рисунок 1). Основой МК является ЦПУ C28x со встроенной поддержкой DSP-инструкций, в частности - операций умножения с накоплением (MAC) 32х32 бит. Вычислительные способности в масштабе реального времени еще больше усилены у некоторых представителей серии TMS320F2803x. Речь идет о МК со встроенным блоком CLA для ускорения алгоритмов управления. Этот блок представляет собой ускоритель 32-битных арифметических операций с плавающей запятой и предназначен для автономной реализации функций цифрового регулятора без участия ЦПУ. Для этих целей предусмотрена возможность прямого доступа блока CLA к встроенным УВВ и их прерываниям. Блок CLA выполнен как независимое процессорное ядро и имеет собственный набор инструкций и пространство памяти. Благодаря этому он работает совершенно независимо от ЦПУ.

У МК Piccolo нет необоснованного переизбытка аппаратных ресурсов, что объясняет привлекательность их цены (не превышает десяти долларов). Здесь количество и качество встроенных модулей строго привязаны к потребностям контроллера электропривода. В частности встроенные ШИМ-контроллеры способны обеспечить управление несколькими электродвигателями и силовыми преобразователями, а модуль 12-битного АЦП обеспечивает высокую точность и быстродействие оцифровки аналоговых сигналов. У некоторых МК также имеются прецизионные ШИМ-контроллеры (HR PWM) с повышенной разрешающей способностью (150 пс).
Архитектура МК Piccolo также несет в себе ряд других преимуществ.
- Простота применения.
Благодаря интеграции прецизионных генераторов, супервизора питания, схемы сброса при подаче питания и стабилизатора напряжения, МК Piccolo характеризуются чрезвычайно простой внешней обвязкой. Фактически достаточными являются внешняя подача напряжения питания 3,3 В и установка блокировочных конденсаторов у выводов питания. Для облегчения работы с разнообразными датчиками положения и скорости у некоторых МК предусмотрены блоки квадрутурного энкодера (QEP) и захвата (eCAP).
- Высокое быстродействие обработки сигналов.
Помимо DSP-инструкций и блока CLA, ускорению обработки сигналов также способствуют высокая тактовая частота ЦПУ (до 68 МГц) и оптимизированная по минимальности задержек система прерываний.
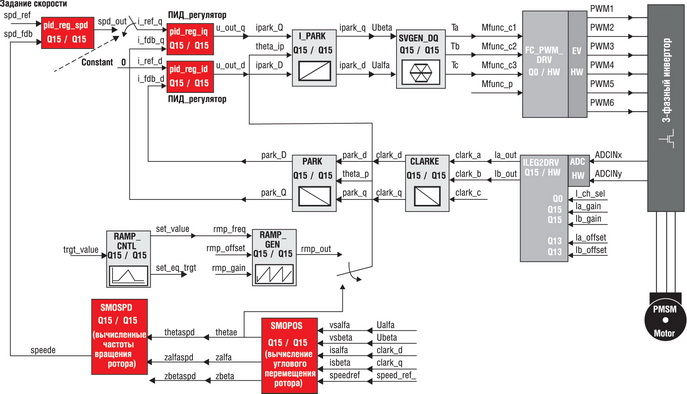
Преимущества МК Piccolo, направленные на минимизацию себестоимости и повышение качества конечного решения, в особой степени проявляются при реализации алгоритмов векторного управления, использующихся для регулирования вентильных и асинхронных двигателей. Пример структурной схемы системы с векторным управлением вентильным двигателем без датчиков положения изображен на рисунке 2 [1]. Здесь показано как широкие вычислительные возможности можно обратить в реальное снижение себестоимости решения. Например, в схеме предусмотрено использование только двух датчиков тока (сигналы ADCINx и ADCINy), так как ток третьей фазы можно вычислить математическим путем. Кроме того, здесь используется косвенная оценка положения и частоты вращения ротора по известным фазным токам. Благодаря этому из системы исключается еще один дорогостоящий датчик вместе с необходимостью его конструктивной привязки к ЭД.
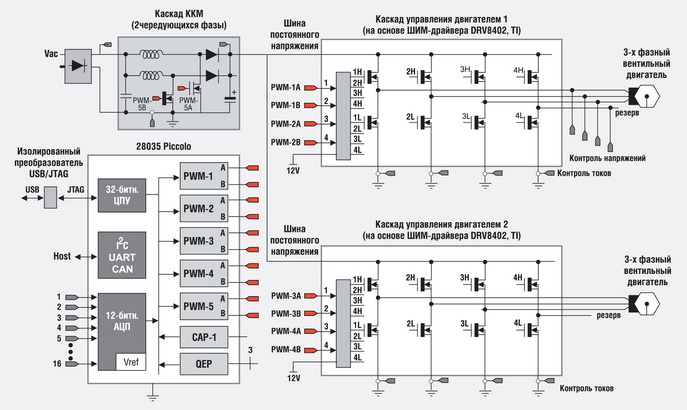
Примечателен тот факт, что даже при реализации рассмотренного алгоритма управления в двух каналах одновременно, МК Piccolo сохраняют запас вычислительной мощности для программного управления еще одним таким немаловажным каскадом, как корректор коэффициента мощности (ККМ). Система управления двумя вентильными двигателями и каскадом ККМ демонстрируется на рисунке 3. Необходимость в каскаде ККМ обусловлена действием разнообразных регулирующих требований к коэффициенту мощности и гармоническому составу потребляемого тока. В идеале, каскад ККМ должен обеспечить следование потребляемого тока за формой напряжения питания. В таком случае электропривод будет восприниматься сетью как активная нагрузка. Для этих целей здесь применен силовой каскад двухфазного повышающего преобразования, который преобразует входное напряжение в повышенное стабилизированное напряжение. Задача управления стабилизацией напряжения в схеме полностью возложена на МК Piccolo. Наличие каскада ККМ также положительно сказывается и на эксплуатационных характеристиках электропривода. Благодаря стабилизации напряжения, потребляемый ток изменяется более плавно, не приводя к скачкообразному возрастанию потребления, например, при запуске ЭД или динамических изменениях нагрузки. Конфигурация, подобная показанной на рисунке 3, типична для современных систем кондиционирования воздуха, где используются два электропривода: компрессора и вентилятора.
Представленная на рисунке 3 система доступна в готовом виде в составе выпускаемых TI наборов для проектирования [2]. Всего выпускается два таких набора: расширенный для управления двумя ВД и одним каскадом ККМ (TMDS2MTRPFCKIT) и сокращенный для управления только одним ВД и одним каскадом ККМ (TMDS1MTRPFCKIT).
Как показано на рисунке 4, наборы укомплектованы базовой платой с силовыми и драйверными каскадами, дочерней платой управления на основе МК TMS320F28035, блоком питания (24 В/60 Вт), USB-кабелем, электродвигателями и компакт-диском с необходимой документацией и программным обеспечением. Вместо входящей в комплект платы управления можно применить любую другую выпускаемую TI плату управления. В частности, доступна для приобретения плата на основе другого МК Piccolo TMS320F28027. Также важно обратить внимание, что рассматриваемые наборы не требуют приобретения отдельного JTAG-адаптера встроенной в МК отладочной системы.

Рис. 4. Внешний вид компонентов набора для проектирования TMDS2MTRPFCKIT
Помимо аппаратной поддержки проектирования, TI также оказывает всестороннюю программную поддержку в виде бесплатных библиотек функций управления ЭД, каскадом ККМ, цифровых регуляторов (на основе блока CLA) и цифровой обработки сигналов.
Заключение
МК Piccolo, благодаря их высоким вычислительным способностям в масштабе реального времени, интеграции высококачественных модулей для многоканальной широтно-импульсной модуляции, аналогово-цифрового преобразования и передачи данных, являются идеальной платформой для построения контроллеров современных асинхронных и вентильных электроприводов с векторным управлением. МК Piccolo несут в себе множество инструментов для минимизации себестоимости такого контроллера. В их числе - собственно невысокая стоимость МК, простота схемы включения, возможность цифрового управления несколькими силовыми каскадами (в частности двумя трехфазными ЭД и одним ККМ), возможность исключения из системы дорогостоящих датчиков, а также доступность всесторонней технической поддержки. Выпуск некоторых МК Piccolo в исполнении для температурного диапазона -40...125°С и с интерфейсами LIN и CAN делает привлекательным их использование для управления разнообразными автомобильными электроприводами. Кроме того, МК Piccolo с равным успехом могут использоваться для цифрового управления силовыми преобразователями систем ветроэнергетики и солнечной энергетики, а также других систем электропитания.
Литература
1. Charlie Ice, Bilal Akin. Designing High-Performance and Power-Effcient Motor Control Systems//White paper, lit. num. SPRT528, Texas Instruments, June 2009 - 10p.
2. PiccoloTM Motor Control Developer's Kits//Brochure, lit. num. SPRT527, Texas Instruments, 2009 - 2p.
Получение технической информации, заказ образцов, поставка - mail: dsp.vesti@compel.ru